 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymSeqBench: a unified framework for the generation and analysis of rule-based symbolic sequences and datasets
Dec 31, 2025Sequential structure is a key feature of multiple domains of natural cognition and behavior, such as language, movement and decision-making. Likewise, it is also a central property of tasks to which we would like to apply artificial intelligence. It is therefore of great importance to develop frameworks that allow us to evaluate sequence learning and processing in a domain agnostic fashion, whilst simultaneously providing a link to formal theories of computation and computability. To address this need, we introduce two complementary software tools: SymSeq, designed to rigorously generate and analyze structured symbolic sequences, and SeqBench, a comprehensive benchmark suite of rule-based sequence processing tasks to evaluate the performance of artificial learning systems in cognitively relevant domains. In combination, SymSeqBench offers versatility in investigating sequential structure across diverse knowledge domains, including experimental psycholinguistics, cognitive psychology, behavioral analysis, neuromorphic computing and artificial intelligence. Due to its basis in Formal Language Theory (FLT), SymSeqBench provides researchers in multiple domains with a convenient and practical way to apply the concepts of FLT to conceptualize and standardize their experiments, thus advancing our understanding of cognition and behavior through shared computational frameworks and formalisms. The tool is modular, openly available and accessible to the research community.
Phenomenological modeling of diverse and heterogeneous synaptic dynamics at natural density
Dec 10, 2022This chapter sheds light on the synaptic organization of the brain from the perspective of computational neuroscience. It provides an introductory overview on how to account for empirical data in mathematical models, implement them in software, and perform simulations reflecting experiments. This path is demonstrated with respect to four key aspects of synaptic signaling: the connectivity of brain networks, synaptic transmission, synaptic plasticity, and the heterogeneity across synapses. Each step and aspect of the modeling and simulation workflow comes with its own challenges and pitfalls, which are highlighted and addressed in detail.
Closed loop interactions between spiking neural network and robotic simulators based on MUSIC and ROS
Apr 16, 2016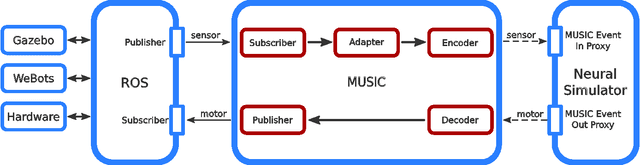
In order to properly assess the function and computational properties of simulated neural systems, it is necessary to account for the nature of the stimuli that drive the system. However, providing stimuli that are rich and yet both reproducible and amenable to experimental manipulations is technically challenging, and even more so if a closed-loop scenario is required. In this work, we present a novel approach to solve this problem, connecting robotics and neural network simulators. We implement a middleware solution that bridges the Robotic Operating System (ROS) to the Multi-Simulator Coordinator (MUSIC). This enables any robotic and neural simulators that implement the corresponding interfaces to be efficiently coupled, allowing real-time performance for a wide range of configurations. This work extends the toolset available for researchers in both neurorobotics and computational neuroscience, and creates the opportunity to perform closed-loop experiments of arbitrary complexity to address questions in multiple areas, including embodiment, agency, and reinforcement learning.