 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWaveSense: Efficient Temporal Convolutions with Spiking Neural Networks for Keyword Spotting
Nov 02, 2021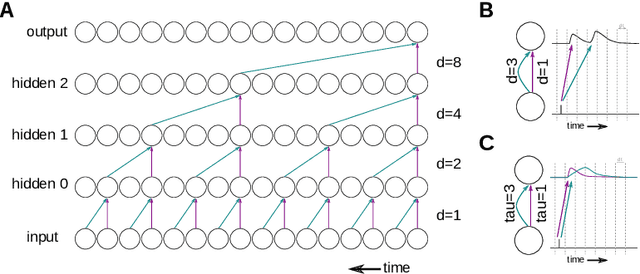
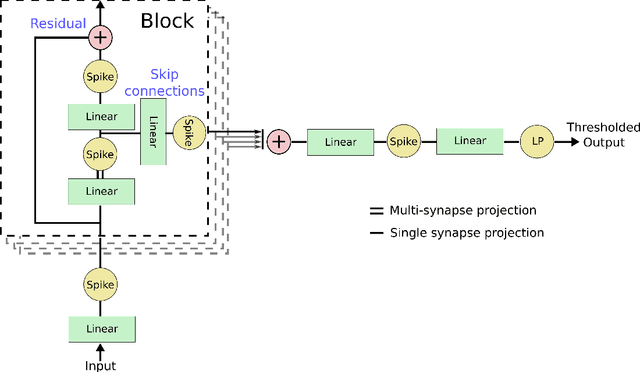
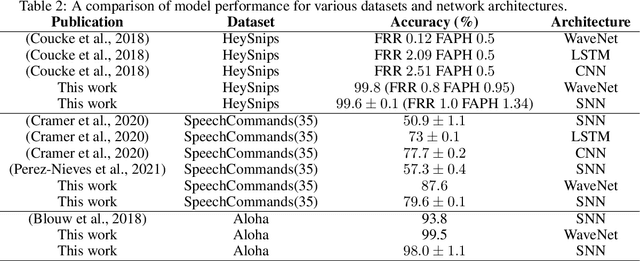
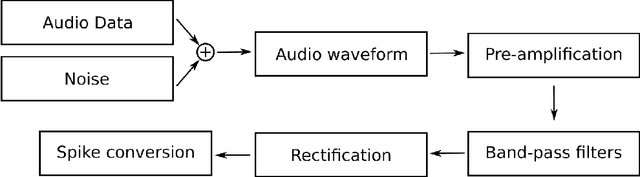
Ultra-low power local signal processing is a crucial aspect for edge applications on always-on devices. Neuromorphic processors emulating spiking neural networks show great computational power while fulfilling the limited power budget as needed in this domain. In this work we propose spiking neural dynamics as a natural alternative to dilated temporal convolutions. We extend this idea to WaveSense, a spiking neural network inspired by the WaveNet architecture. WaveSense uses simple neural dynamics, fixed time-constants and a simple feed-forward architecture and hence is particularly well suited for a neuromorphic implementation. We test the capabilities of this model on several datasets for keyword-spotting. The results show that the proposed network beats the state of the art of other spiking neural networks and reaches near state-of-the-art performance of artificial neural networks such as CNNs and LSTMs.
Closed loop interactions between spiking neural network and robotic simulators based on MUSIC and ROS
Apr 16, 2016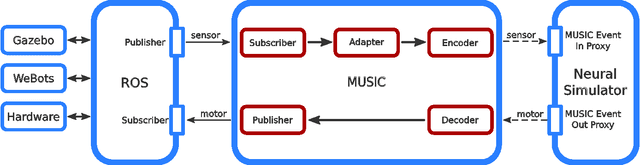
In order to properly assess the function and computational properties of simulated neural systems, it is necessary to account for the nature of the stimuli that drive the system. However, providing stimuli that are rich and yet both reproducible and amenable to experimental manipulations is technically challenging, and even more so if a closed-loop scenario is required. In this work, we present a novel approach to solve this problem, connecting robotics and neural network simulators. We implement a middleware solution that bridges the Robotic Operating System (ROS) to the Multi-Simulator Coordinator (MUSIC). This enables any robotic and neural simulators that implement the corresponding interfaces to be efficiently coupled, allowing real-time performance for a wide range of configurations. This work extends the toolset available for researchers in both neurorobotics and computational neuroscience, and creates the opportunity to perform closed-loop experiments of arbitrary complexity to address questions in multiple areas, including embodiment, agency, and reinforcement learning.