 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Model Predictive Control by Learning Classifiers
Apr 05, 2022



Stochastic model predictive control has been a successful and robust control framework for many robotics tasks where the system dynamics model is slightly inaccurate or in the presence of environment disturbances. Despite the successes, it is still unclear how to best adjust control parameters to the current task in the presence of model parameter uncertainty and heteroscedastic noise. In this paper, we propose an adaptive MPC variant that automatically estimates control and model parameters by leveraging ideas from Bayesian optimisation (BO) and the classical expected improvement acquisition function. We leverage recent results showing that BO can be reformulated via density ratio estimation, which can be efficiently approximated by simply learning a classifier. This is then integrated into a model predictive path integral control framework yielding robust controllers for a variety of challenging robotics tasks. We demonstrate the approach on classical control problems under model uncertainty and robotics manipulation tasks.
Bayesian Optimisation for Robust Model Predictive Control under Model Parameter Uncertainty
Mar 02, 2022

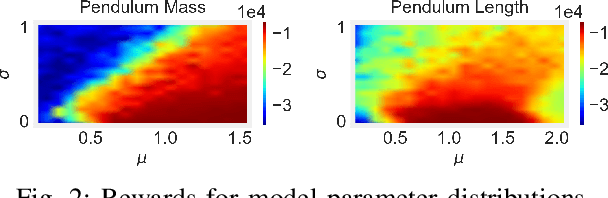

We propose an adaptive optimisation approach for tuning stochastic model predictive control (MPC) hyper-parameters while jointly estimating probability distributions of the transition model parameters based on performance rewards. In particular, we develop a Bayesian optimisation (BO) algorithm with a heteroscedastic noise model to deal with varying noise across the MPC hyper-parameter and dynamics model parameter spaces. Typical homoscedastic noise models are unrealistic for tuning MPC since stochastic controllers are inherently noisy, and the level of noise is affected by their hyper-parameter settings. We evaluate the proposed optimisation algorithm in simulated control and robotics tasks where we jointly infer control and dynamics parameters. Experimental results demonstrate that our approach leads to higher cumulative rewards and more stable controllers.
Heteroscedastic Bayesian Optimisation for Stochastic Model Predictive Control
Oct 08, 2020
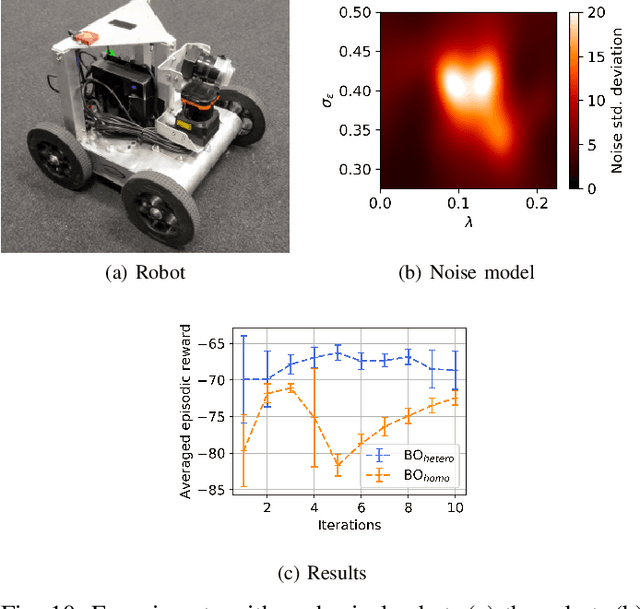
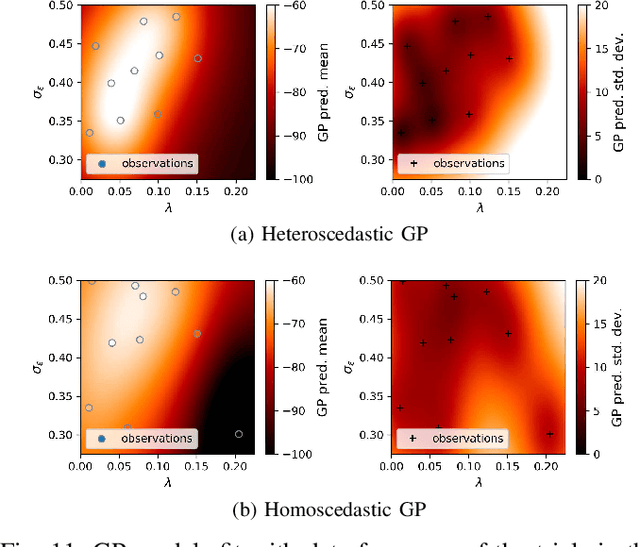
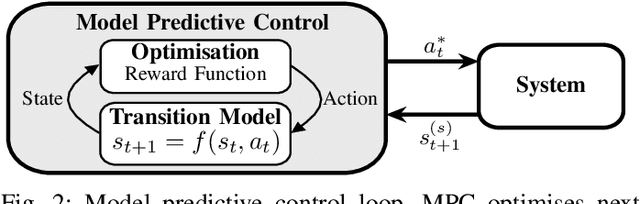
Model predictive control (MPC) has been successful in applications involving the control of complex physical systems. This class of controllers leverages the information provided by an approximate model of the system's dynamics to simulate the effect of control actions. MPC methods also present a few hyper-parameters which may require a relatively expensive tuning process by demanding interactions with the physical system. Therefore, we investigate fine-tuning MPC methods in the context of stochastic MPC, which presents extra challenges due to the randomness of the controller's actions. In these scenarios, performance outcomes present noise, which is not homogeneous across the domain of possible hyper-parameter settings, but which varies in an input-dependent way. To address these issues, we propose a Bayesian optimisation framework that accounts for heteroscedastic noise to tune hyper-parameters in control problems. Empirical results on benchmark continuous control tasks and a physical robot support the proposed framework's suitability relative to baselines, which do not take heteroscedasticity into account.