 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeteroscedastic Bayesian Optimisation for Stochastic Model Predictive Control
Paper and Code
Oct 08, 2020
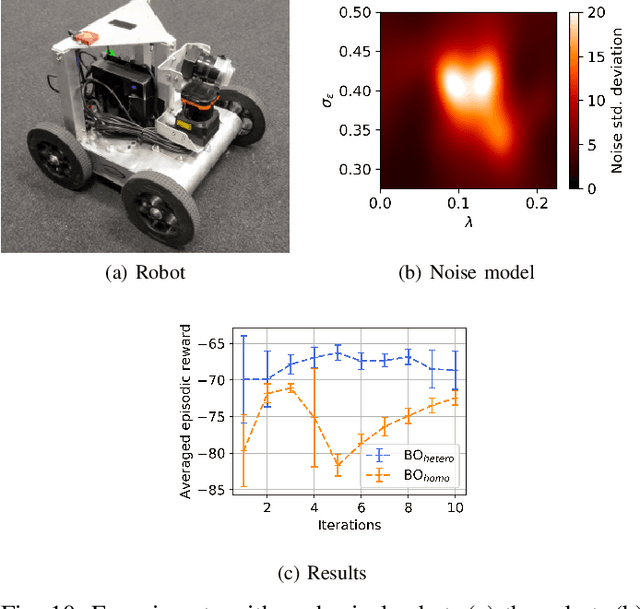
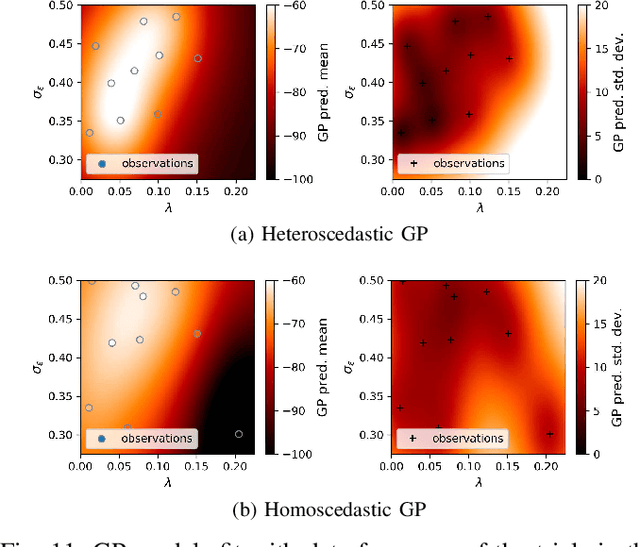
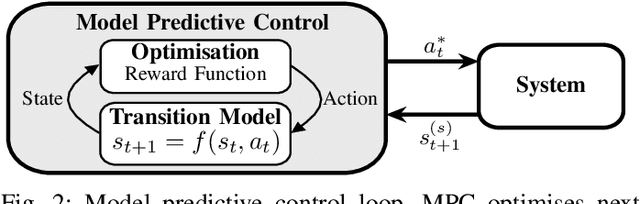
Model predictive control (MPC) has been successful in applications involving the control of complex physical systems. This class of controllers leverages the information provided by an approximate model of the system's dynamics to simulate the effect of control actions. MPC methods also present a few hyper-parameters which may require a relatively expensive tuning process by demanding interactions with the physical system. Therefore, we investigate fine-tuning MPC methods in the context of stochastic MPC, which presents extra challenges due to the randomness of the controller's actions. In these scenarios, performance outcomes present noise, which is not homogeneous across the domain of possible hyper-parameter settings, but which varies in an input-dependent way. To address these issues, we propose a Bayesian optimisation framework that accounts for heteroscedastic noise to tune hyper-parameters in control problems. Empirical results on benchmark continuous control tasks and a physical robot support the proposed framework's suitability relative to baselines, which do not take heteroscedasticity into account.