 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Optimisation for Robust Model Predictive Control under Model Parameter Uncertainty
Paper and Code
Mar 02, 2022

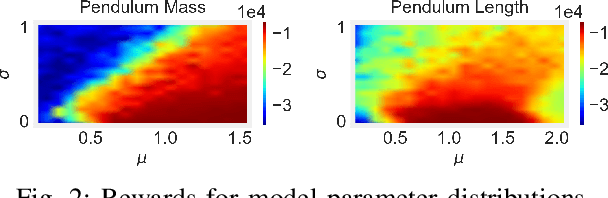

We propose an adaptive optimisation approach for tuning stochastic model predictive control (MPC) hyper-parameters while jointly estimating probability distributions of the transition model parameters based on performance rewards. In particular, we develop a Bayesian optimisation (BO) algorithm with a heteroscedastic noise model to deal with varying noise across the MPC hyper-parameter and dynamics model parameter spaces. Typical homoscedastic noise models are unrealistic for tuning MPC since stochastic controllers are inherently noisy, and the level of noise is affected by their hyper-parameter settings. We evaluate the proposed optimisation algorithm in simulated control and robotics tasks where we jointly infer control and dynamics parameters. Experimental results demonstrate that our approach leads to higher cumulative rewards and more stable controllers.