 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Trajectory Stitching with Flow Models
May 12, 2025Generative models have shown great promise as trajectory planners, given their affinity to modeling complex distributions and guidable inference process. Previous works have successfully applied these in the context of robotic manipulation but perform poorly when the required solution does not exist as a complete trajectory within the training set. We identify that this is a result of being unable to plan via stitching, and subsequently address the architectural and dataset choices needed to remedy this. On top of this, we propose a novel addition to the training and inference procedures to both stabilize and enhance these capabilities. We demonstrate the efficacy of our approach by generating plans with out of distribution boundary conditions and performing obstacle avoidance on the Franka Panda in simulation and on real hardware. In both of these tasks our method performs significantly better than the baselines and is able to avoid obstacles up to four times as large.
Offline Adaptation of Quadruped Locomotion using Diffusion Models
Nov 13, 2024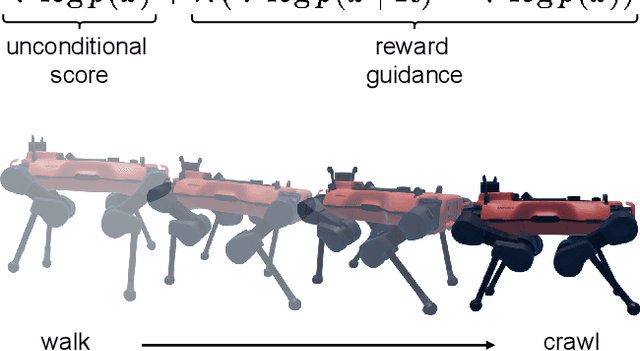
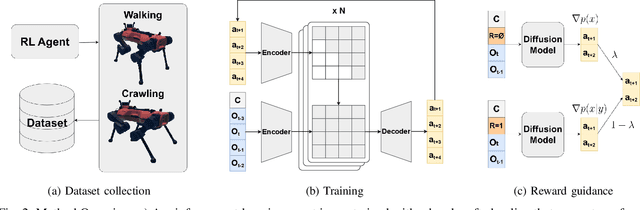
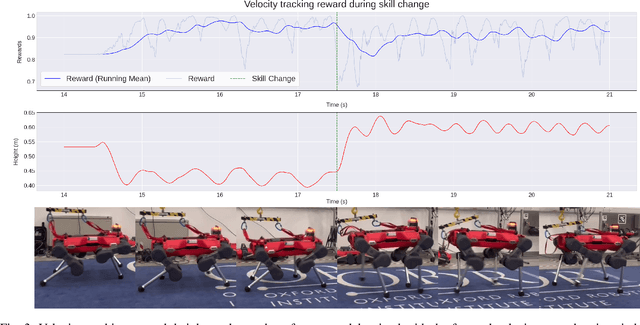
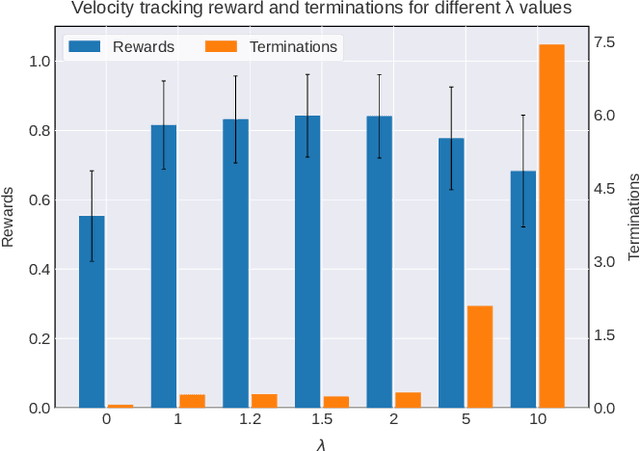
We present a diffusion-based approach to quadrupedal locomotion that simultaneously addresses the limitations of learning and interpolating between multiple skills and of (modes) offline adapting to new locomotion behaviours after training. This is the first framework to apply classifier-free guided diffusion to quadruped locomotion and demonstrate its efficacy by extracting goal-conditioned behaviour from an originally unlabelled dataset. We show that these capabilities are compatible with a multi-skill policy and can be applied with little modification and minimal compute overhead, i.e., running entirely on the robots onboard CPU. We verify the validity of our approach with hardware experiments on the ANYmal quadruped platform.