Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOffline Adaptation of Quadruped Locomotion using Diffusion Models
Paper and Code
Nov 13, 2024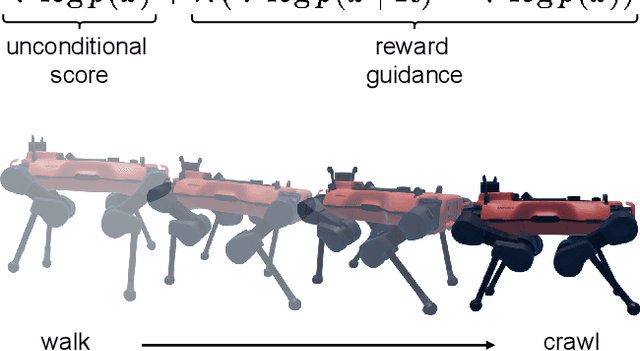
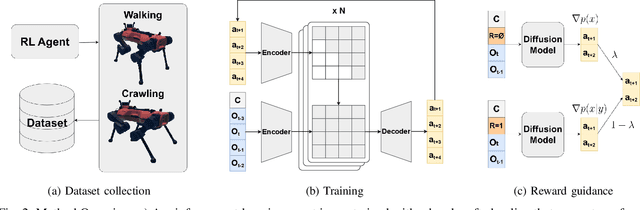
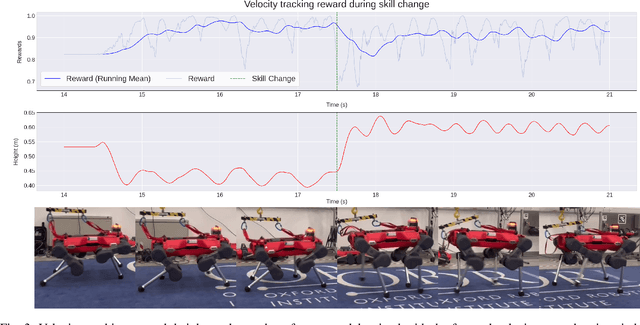
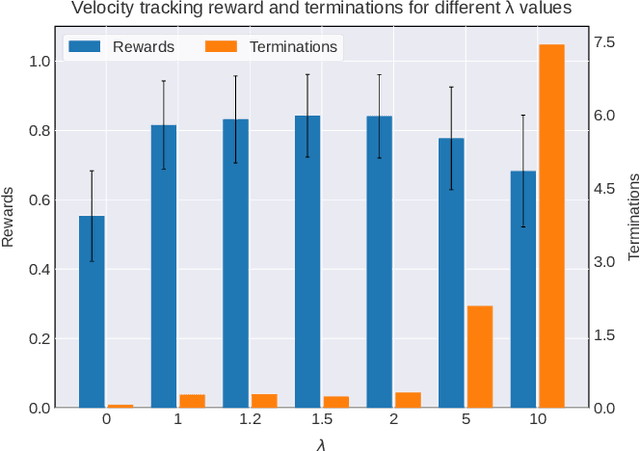
We present a diffusion-based approach to quadrupedal locomotion that simultaneously addresses the limitations of learning and interpolating between multiple skills and of (modes) offline adapting to new locomotion behaviours after training. This is the first framework to apply classifier-free guided diffusion to quadruped locomotion and demonstrate its efficacy by extracting goal-conditioned behaviour from an originally unlabelled dataset. We show that these capabilities are compatible with a multi-skill policy and can be applied with little modification and minimal compute overhead, i.e., running entirely on the robots onboard CPU. We verify the validity of our approach with hardware experiments on the ANYmal quadruped platform.
View paper on