 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHaptic Feedback Improves Human-Robot Agreement and User Satisfaction in Shared-Autonomy Teleoperation
Mar 05, 2021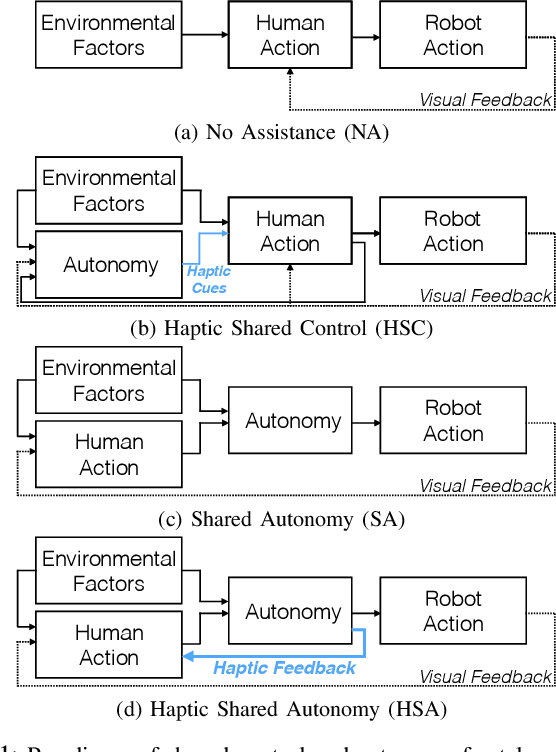

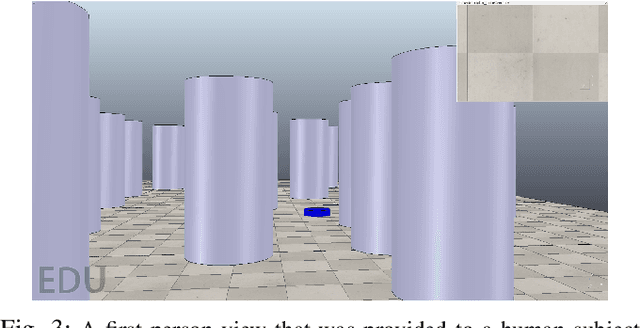
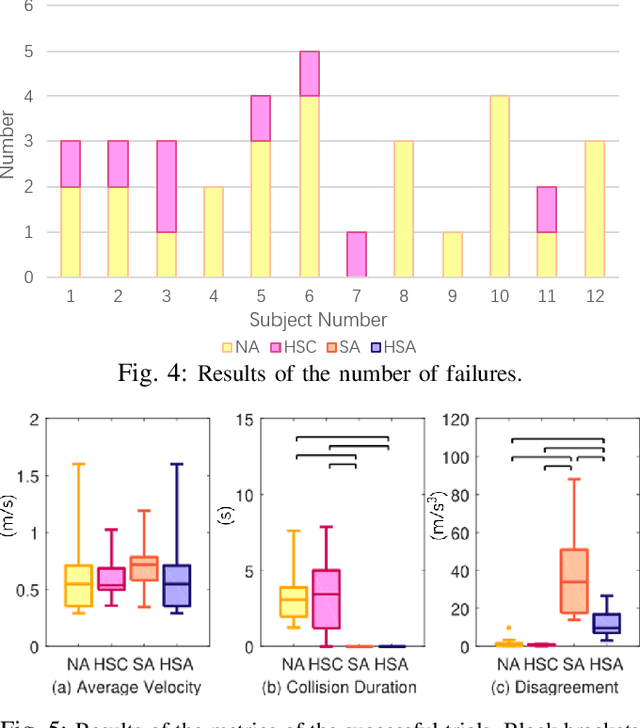
Shared autonomy teleoperation can guarantee safety, but does so by reducing the human operator's control authority, which can lead to reduced levels of human-robot agreement and user satisfaction. This paper presents a novel haptic shared autonomy teleoperation paradigm that uses haptic feedback to inform the user about the inner state of a shared autonomy paradigm, while still guaranteeing safety. This differs from haptic shared control, which uses haptic feedback to inform the user's actions, but gives the human operator full control over the robot's actions. We conducted a user study in which twelve users flew a simulated UAV in a search-and-rescue task with no assistance or assistance provided by haptic shared control, shared autonomy, or haptic shared autonomy. All assistive teleoperation methods use control barrier functions to find a control command that is both safe and as close as possible to the human-generated control command. For assistive teleoperation conditions with haptic feedback, we apply a force to the user that is proportional to the difference between the human-generated control and the safe control. We find that haptic shared autonomy improves the user's task performance and satisfaction. We also find that haptic feedback in assistive teleoperation can improve the user's situational awareness. Finally, results show that adding haptic feedback to shared-autonomy teleoperation can improve human-robot agreement.
Experimental Assessment of Human-Robot Teaming for Multi-Step Remote Manipulation with Expert Operators
Nov 22, 2020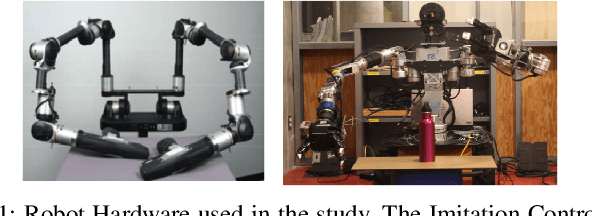
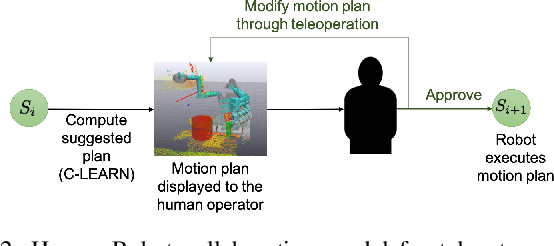
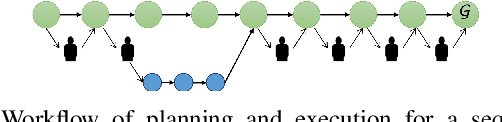
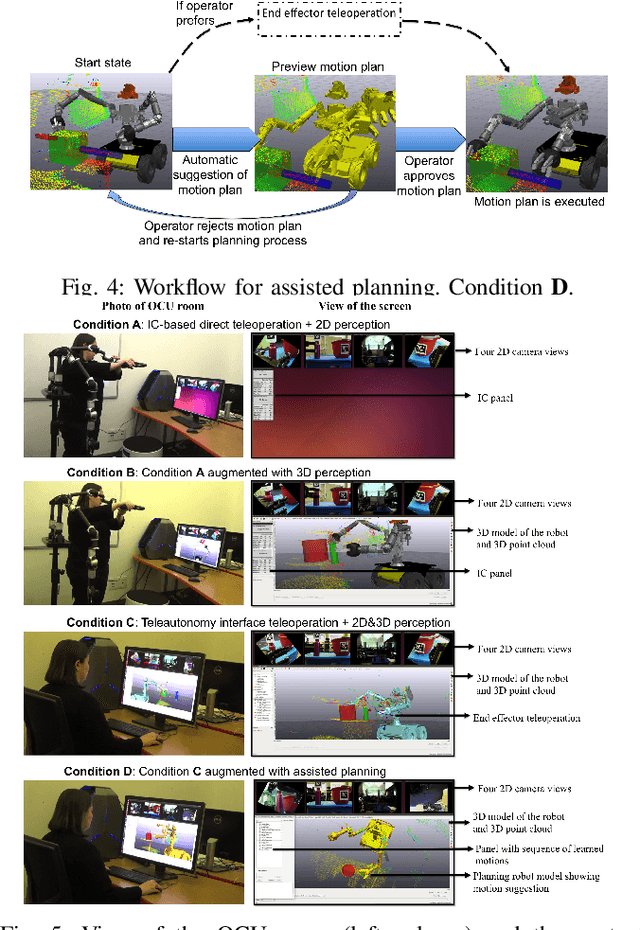
Remote robot manipulation with human control enables applications where safety and environmental constraints are adverse to humans (e.g. underwater, space robotics and disaster response) or the complexity of the task demands human-level cognition and dexterity (e.g. robotic surgery and manufacturing). These systems typically use direct teleoperation at the motion level, and are usually limited to low-DOF arms and 2D perception. Improving dexterity and situational awareness demands new interaction and planning workflows. We explore the use of human-robot teaming through teleautonomy with assisted planning for remote control of a dual-arm dexterous robot for multi-step manipulation tasks, and conduct a within-subjects experimental assessment (n=12 expert users) to compare it with other methods, resulting in the following four conditions: (A) Direct teleoperation with imitation controller + 2D perception, (B) Condition A + 3D perception, (C) Teleautonomy interface teleoperation + 2D & 3D perception, (D) Condition C + assisted planning. The results indicate that this approach (D) achieves task times comparable with direct teleoperation (A,B) while improving a number of other objective and subjective metrics, including re-grasps, collisions, and TLX workload metrics. When compared to a similar interface but removing the assisted planning (C), D reduces the task time and removes a significant interaction with the level of expertise of the operator, resulting in a performance equalizer across users.
Variable-Scaling Rate Control for Collision-Free Teleoperation of an Unmanned Aerial Vehicle
Nov 08, 2019



We propose that automatically adjusting the scale factor in rate-control teleoperation could enable a human operator to better control the motion of a remote robot. In this paper, we present four new variable-scaling rate-control methods that adjust the scale factor depending on the state of the user's input commands and/or the risk of a collision between the robot and its environment. Methods that depend on the risk of a collision are designed to guarantee collision avoidance by setting the scale factor to be zero if the operator issues a command that would result in a collision between the robot and its environment. A within-subject user study was conducted to determine the effects of the four newly designed rate-control methods and a traditional fixed-scale rate-control method on a person's ability to complete a navigation task in a simulated two-dimensional environment. The results of this study indicate that well-designed variable-scale rate control can guarantee collision-free teleoperation without reducing task efficiency.
Haptic Teleoperation of UAVs through Control Barrier Functions
Nov 08, 2019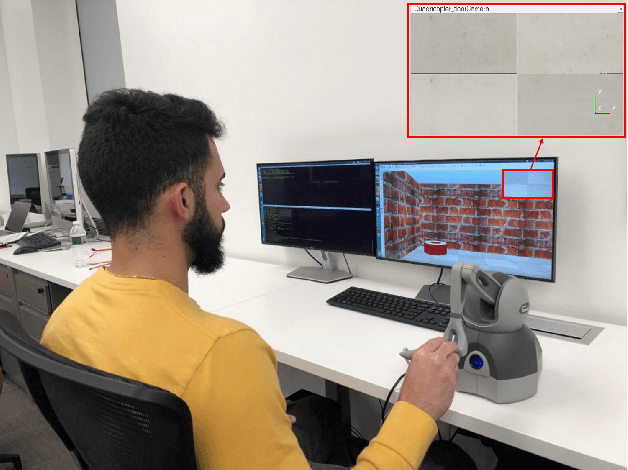

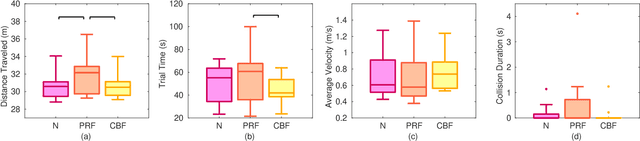
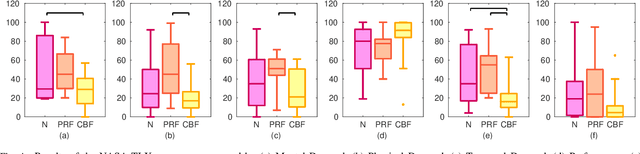
This paper presents a novel approach to haptic teleoperation. Specifically, we use control barrier functions (CBFs) to generate force feedback to help human operators safely fly quadrotor UAVs. CBFs take a control signal as input and output a control signal that is as close as possible to the initial control signal, while also meeting specified safety constraints. In the proposed method, we generate haptic force feedback based on the difference between a command issued by the human operator and the safe command returned by a CBF. In this way, if the user issues an unsafe control command, the haptic feedback will help guide the user towards the safe input command that is closest to their current command. We conducted a within-subject user study, in which 12 participants flew a simulated UAV in a virtual hallway environment. Participants completed the task with our proposed CBF-based haptic feedback, no haptic feedback, and haptic feedback generated via parametric risk fields, which is a state-of-the-art method described in the literature. The results of this study show that CBF-based haptic feedback can improve a human operator's ability to safely fly a UAV and reduce the operator's perceived workload, without sacrificing task efficiency.