 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental Assessment of Human-Robot Teaming for Multi-Step Remote Manipulation with Expert Operators
Paper and Code
Nov 22, 2020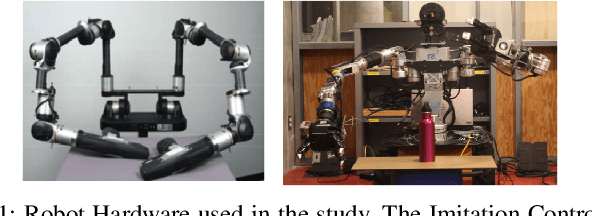
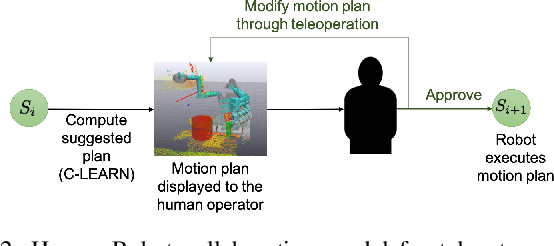
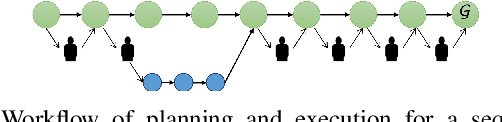
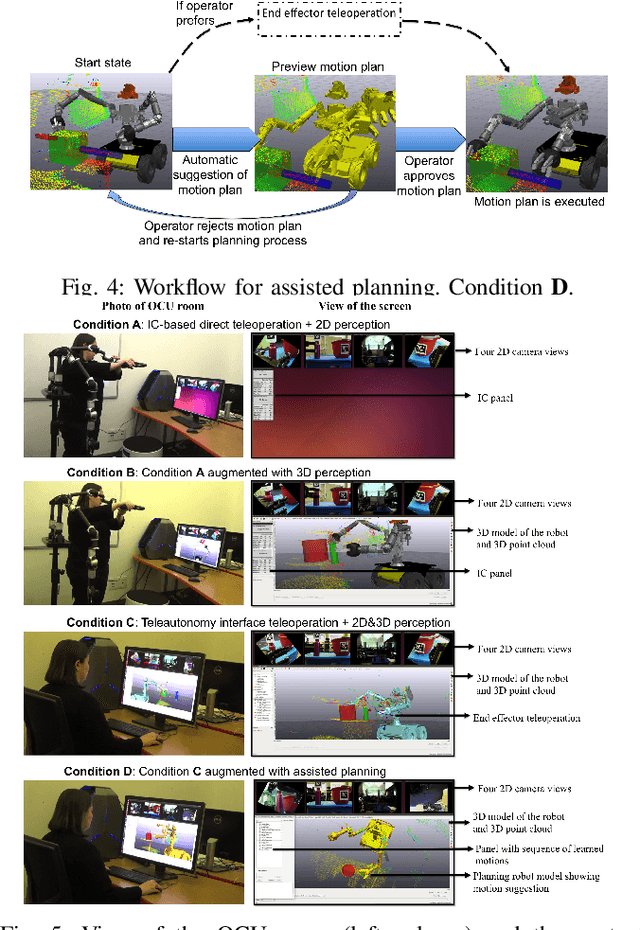
Remote robot manipulation with human control enables applications where safety and environmental constraints are adverse to humans (e.g. underwater, space robotics and disaster response) or the complexity of the task demands human-level cognition and dexterity (e.g. robotic surgery and manufacturing). These systems typically use direct teleoperation at the motion level, and are usually limited to low-DOF arms and 2D perception. Improving dexterity and situational awareness demands new interaction and planning workflows. We explore the use of human-robot teaming through teleautonomy with assisted planning for remote control of a dual-arm dexterous robot for multi-step manipulation tasks, and conduct a within-subjects experimental assessment (n=12 expert users) to compare it with other methods, resulting in the following four conditions: (A) Direct teleoperation with imitation controller + 2D perception, (B) Condition A + 3D perception, (C) Teleautonomy interface teleoperation + 2D & 3D perception, (D) Condition C + assisted planning. The results indicate that this approach (D) achieves task times comparable with direct teleoperation (A,B) while improving a number of other objective and subjective metrics, including re-grasps, collisions, and TLX workload metrics. When compared to a similar interface but removing the assisted planning (C), D reduces the task time and removes a significant interaction with the level of expertise of the operator, resulting in a performance equalizer across users.