 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNear-Optimal Reactive Synthesis Incorporating Runtime Information
Jul 31, 2020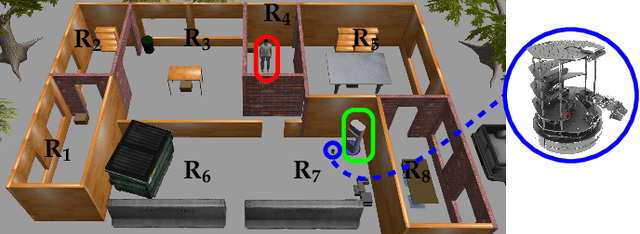
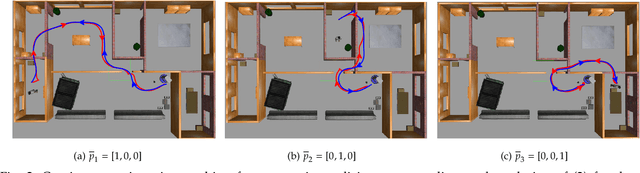
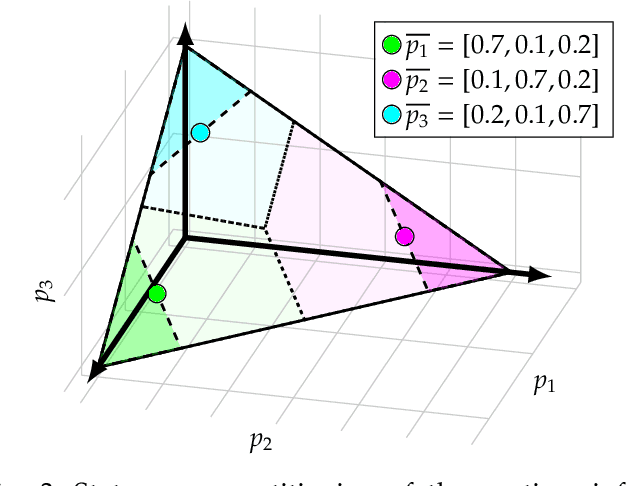
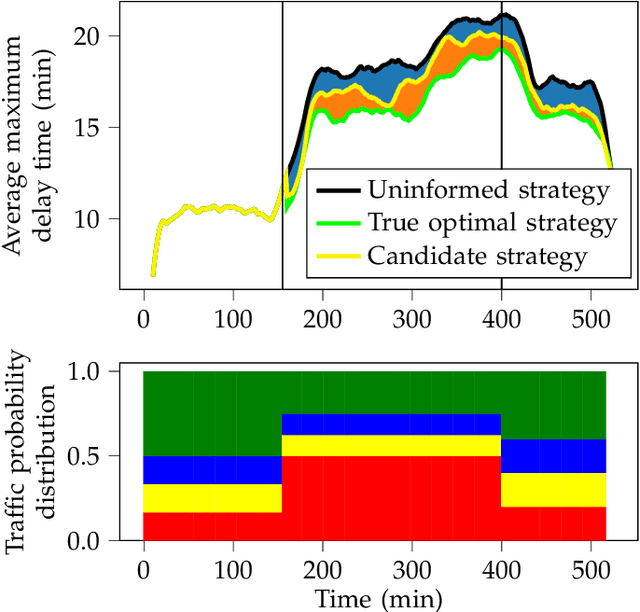
We consider the problem of optimal reactive synthesis - compute a strategy that satisfies a mission specification in a dynamic environment, and optimizes a performance metric. We incorporate task-critical information, that is only available at runtime, into the strategy synthesis in order to improve performance. Existing approaches to utilising such time-varying information require online re-synthesis, which is not computationally feasible in real-time applications. In this paper, we pre-synthesize a set of strategies corresponding to candidate instantiations (pre-specified representative information scenarios). We then propose a novel switching mechanism to dynamically switch between the strategies at runtime while guaranteeing all safety and liveness goals are met. We also characterize bounds on the performance suboptimality. We demonstrate our approach on two examples - robotic motion planning where the likelihood of the position of the robot's goal is updated in real-time, and an air traffic management problem for urban air mobility.
Distributed Synthesis of Surveillance Strategies for Mobile Sensors
Feb 06, 2019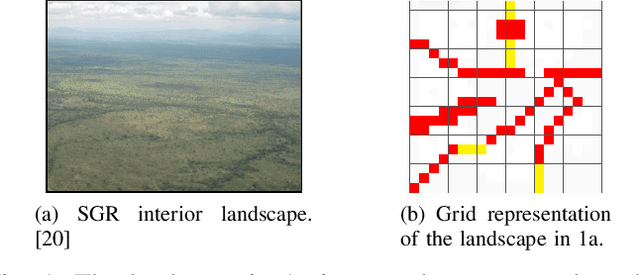
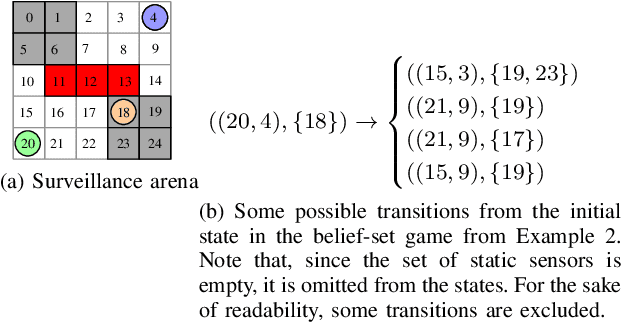

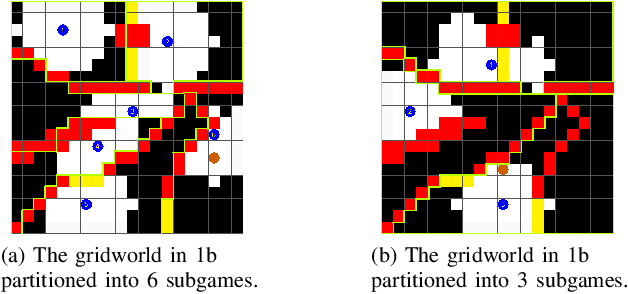
We study the problem of synthesizing strategies for a mobile sensor network to conduct surveillance in partnership with static alarm triggers. We formulate the problem as a multi-agent reactive synthesis problem with surveillance objectives specified as temporal logic formulas. In order to avoid the state space blow-up arising from a centralized strategy computation, we propose a method to decentralize the surveillance strategy synthesis by decomposing the multi-agent game into subgames that can be solved independently. We also decompose the global surveillance specification into local specifications for each sensor, and show that if the sensors satisfy their local surveillance specifications, then the sensor network as a whole will satisfy the global surveillance objective. Thus, our method is able to guarantee global surveillance properties in a mobile sensor network while synthesizing completely decentralized strategies with no need for coordination between the sensors. We also present a case study in which we demonstrate an application of decentralized surveillance strategy synthesis.
Synthesis of surveillance strategies via belief abstraction
Mar 19, 2018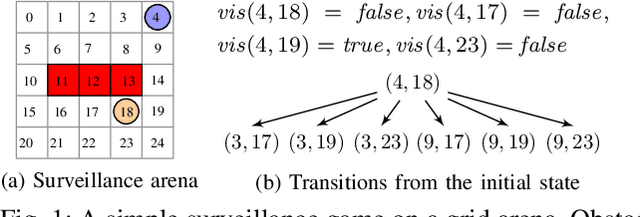
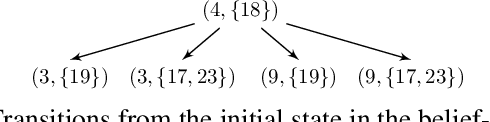

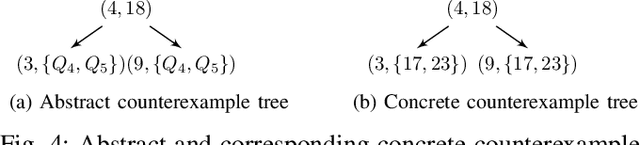
We study the problem of synthesizing a controller for a robot with a surveillance objective, that is, the robot is required to maintain knowledge of the location of a moving, possibly adversarial target. We formulate this problem as a one-sided partial-information game in which the winning condition for the agent is specified as a temporal logic formula. The specification formalizes the surveillance requirement given by the user, including additional non-surveillance tasks. In order to synthesize a surveillance strategy that meets the specification, we transform the partial-information game into a perfect-information one, using abstraction to mitigate the exponential blow-up typically incurred by such transformations. This enables the use of off-the-shelf tools for reactive synthesis. We use counterexample-guided refinement to automatically achieve abstraction precision that is sufficient to synthesize a surveillance strategy. We evaluate the proposed method on two case-studies, demonstrating its applicability to large state-spaces and diverse requirements.
Approximate Counting in SMT and Value Estimation for Probabilistic Programs
Oct 29, 2015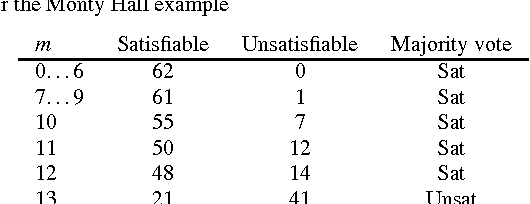

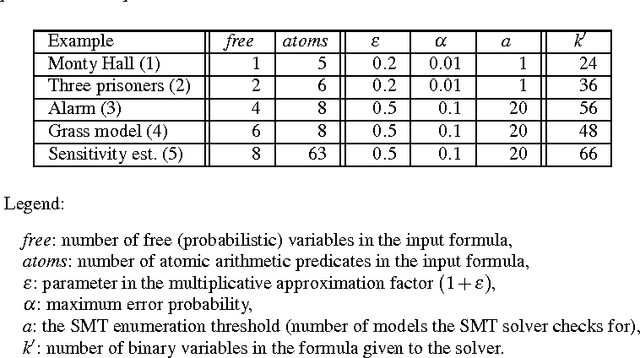
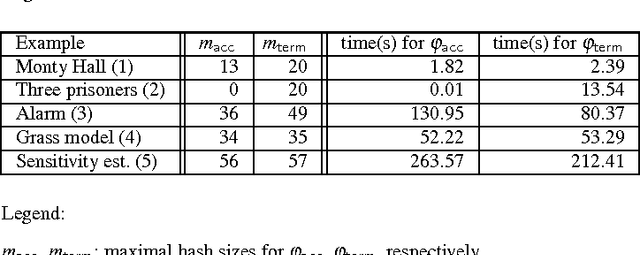
#SMT, or model counting for logical theories, is a well-known hard problem that generalizes such tasks as counting the number of satisfying assignments to a Boolean formula and computing the volume of a polytope. In the realm of satisfiability modulo theories (SMT) there is a growing need for model counting solvers, coming from several application domains (quantitative information flow, static analysis of probabilistic programs). In this paper, we show a reduction from an approximate version of #SMT to SMT. We focus on the theories of integer arithmetic and linear real arithmetic. We propose model counting algorithms that provide approximate solutions with formal bounds on the approximation error. They run in polynomial time and make a polynomial number of queries to the SMT solver for the underlying theory, exploiting "for free" the sophisticated heuristics implemented within modern SMT solvers. We have implemented the algorithms and used them to solve the value problem for a model of loop-free probabilistic programs with nondeterminism.