 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToken Pruning using a Lightweight Background Aware Vision Transformer
Oct 12, 2024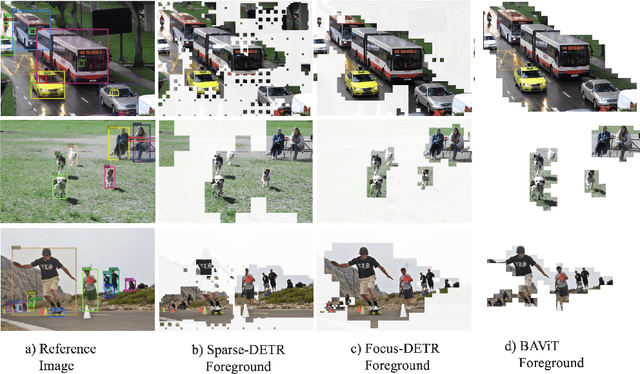
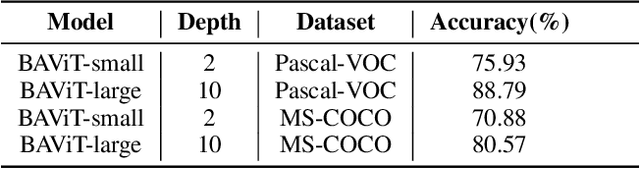

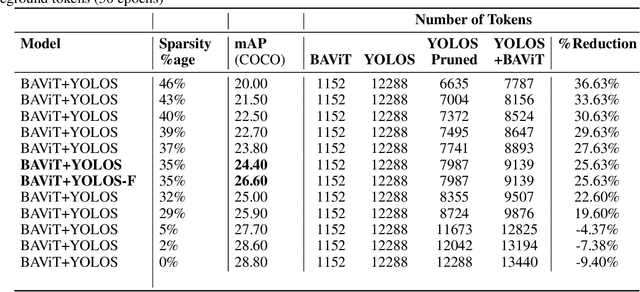
High runtime memory and high latency puts significant constraint on Vision Transformer training and inference, especially on edge devices. Token pruning reduces the number of input tokens to the ViT based on importance criteria of each token. We present a Background Aware Vision Transformer (BAViT) model, a pre-processing block to object detection models like DETR/YOLOS aimed to reduce runtime memory and increase throughput by using a novel approach to identify background tokens in the image. The background tokens can be pruned completely or partially before feeding to a ViT based object detector. We use the semantic information provided by segmentation map and/or bounding box annotation to train a few layers of ViT to classify tokens to either foreground or background. Using 2 layers and 10 layers of BAViT, background and foreground tokens can be separated with 75% and 88% accuracy on VOC dataset and 71% and 80% accuracy on COCO dataset respectively. We show a 2 layer BAViT-small model as pre-processor to YOLOS can increase the throughput by 30% - 40% with a mAP drop of 3% without any sparse fine-tuning and 2% with sparse fine-tuning. Our approach is specifically targeted for Edge AI use cases.
ActNAS : Generating Efficient YOLO Models using Activation NAS
Oct 11, 2024Activation functions introduce non-linearity into Neural Networks, enabling them to learn complex patterns. Different activation functions vary in speed and accuracy, ranging from faster but less accurate options like ReLU to slower but more accurate functions like SiLU or SELU. Typically, same activation function is used throughout an entire model architecture. In this paper, we conduct a comprehensive study on the effects of using mixed activation functions in YOLO-based models, evaluating their impact on latency, memory usage, and accuracy across CPU, NPU, and GPU edge devices. We also propose a novel approach that leverages Neural Architecture Search (NAS) to design YOLO models with optimized mixed activation functions.The best model generated through this method demonstrates a slight improvement in mean Average Precision (mAP) compared to baseline model (SiLU), while it is 22.28% faster and consumes 64.15% less memory on the reference NPU device.
MCUBench: A Benchmark of Tiny Object Detectors on MCUs
Sep 27, 2024We introduce MCUBench, a benchmark featuring over 100 YOLO-based object detection models evaluated on the VOC dataset across seven different MCUs. This benchmark provides detailed data on average precision, latency, RAM, and Flash usage for various input resolutions and YOLO-based one-stage detectors. By conducting a controlled comparison with a fixed training pipeline, we collect comprehensive performance metrics. Our Pareto-optimal analysis shows that integrating modern detection heads and training techniques allows various YOLO architectures, including legacy models like YOLOv3, to achieve a highly efficient tradeoff between mean Average Precision (mAP) and latency. MCUBench serves as a valuable tool for benchmarking the MCU performance of contemporary object detectors and aids in model selection based on specific constraints.
YOLOBench: Benchmarking Efficient Object Detectors on Embedded Systems
Jul 26, 2023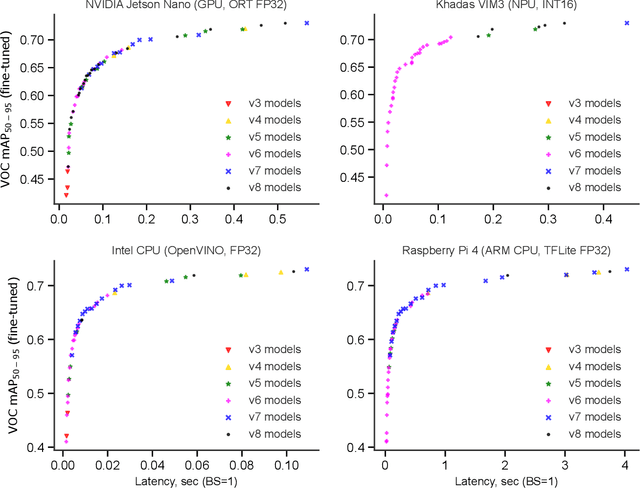
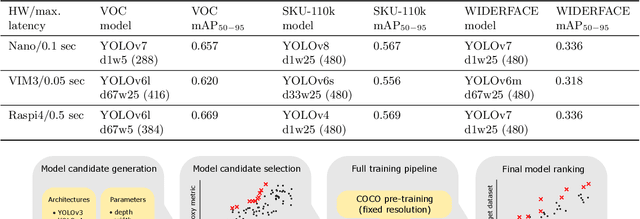
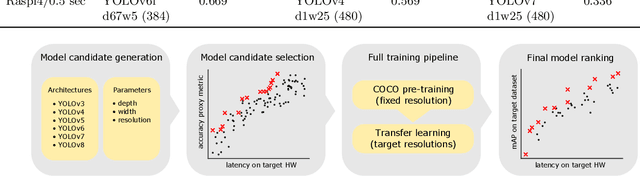
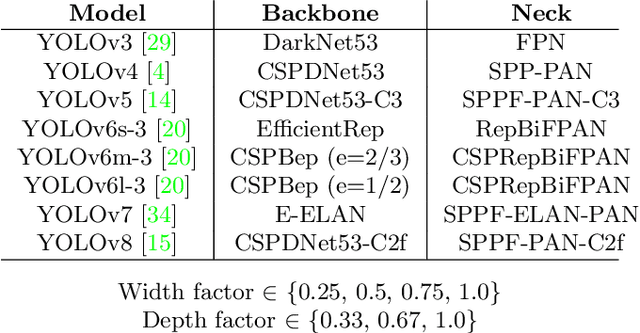
We present YOLOBench, a benchmark comprised of 550+ YOLO-based object detection models on 4 different datasets and 4 different embedded hardware platforms (x86 CPU, ARM CPU, Nvidia GPU, NPU). We collect accuracy and latency numbers for a variety of YOLO-based one-stage detectors at different model scales by performing a fair, controlled comparison of these detectors with a fixed training environment (code and training hyperparameters). Pareto-optimality analysis of the collected data reveals that, if modern detection heads and training techniques are incorporated into the learning process, multiple architectures of the YOLO series achieve a good accuracy-latency trade-off, including older models like YOLOv3 and YOLOv4. We also evaluate training-free accuracy estimators used in neural architecture search on YOLOBench and demonstrate that, while most state-of-the-art zero-cost accuracy estimators are outperformed by a simple baseline like MAC count, some of them can be effectively used to predict Pareto-optimal detection models. We showcase that by using a zero-cost proxy to identify a YOLO architecture competitive against a state-of-the-art YOLOv8 model on a Raspberry Pi 4 CPU. The code and data are available at https://github.com/Deeplite/deeplite-torch-zoo