 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Like Gaze Behavior in Social Robots: A Deep Learning Approach Integrating Human and Non-Human Stimuli
Feb 12, 2026Nonverbal behaviors, particularly gaze direction, play a crucial role in enhancing effective communication in social interactions. As social robots increasingly participate in these interactions, they must adapt their gaze based on human activities and remain receptive to all cues, whether human-generated or not, to ensure seamless and effective communication. This study aims to increase the similarity between robot and human gaze behavior across various social situations, including both human and non-human stimuli (e.g., conversations, pointing, door openings, and object drops). A key innovation in this study, is the investigation of gaze responses to non-human stimuli, a critical yet underexplored area in prior research. These scenarios, were simulated in the Unity software as a 3D animation and a 360-degree real-world video. Data on gaze directions from 41 participants were collected via virtual reality (VR) glasses. Preprocessed data, trained two neural networks-LSTM and Transformer-to build predictive models based on individuals' gaze patterns. In the animated scenario, the LSTM and Transformer models achieved prediction accuracies of 67.6% and 70.4%, respectively; In the real-world scenario, the LSTM and Transformer models achieved accuracies of 72% and 71.6%, respectively. Despite the gaze pattern differences among individuals, our models outperform existing approaches in accuracy while uniquely considering non-human stimuli, offering a significant advantage over previous literature. Furthermore, deployed on the NAO robot, the system was evaluated by 275 participants via a comprehensive questionnaire, with results demonstrating high satisfaction during interactions. This work advances social robotics by enabling robots to dynamically mimic human gaze behavior in complex social contexts.
Developing Neural Network-Based Gaze Control Systems for Social Robots
Feb 11, 2026During multi-party interactions, gaze direction is a key indicator of interest and intent, making it essential for social robots to direct their attention appropriately. Understanding the social context is crucial for robots to engage effectively, predict human intentions, and navigate interactions smoothly. This study aims to develop an empirical motion-time pattern for human gaze behavior in various social situations (e.g., entering, leaving, waving, talking, and pointing) using deep neural networks based on participants' data. We created two video clips-one for a computer screen and another for a virtual reality headset-depicting different social scenarios. Data were collected from 30 participants: 15 using an eye-tracker and 15 using an Oculus Quest 1 headset. Deep learning models, specifically Long Short-Term Memory (LSTM) and Transformers, were used to analyze and predict gaze patterns. Our models achieved 60% accuracy in predicting gaze direction in a 2D animation and 65% accuracy in a 3D animation. Then, the best model was implemented onto the Nao robot; and 36 new participants evaluated its performance. The feedback indicated overall satisfaction, with those experienced in robotics rating the models more favorably.
Gazing at Failure: Investigating Human Gaze in Response to Robot Failure in Collaborative Tasks
Feb 24, 2025Robots are prone to making errors, which can negatively impact their credibility as teammates during collaborative tasks with human users. Detecting and recovering from these failures is crucial for maintaining effective level of trust from users. However, robots may fail without being aware of it. One way to detect such failures could be by analysing humans' non-verbal behaviours and reactions to failures. This study investigates how human gaze dynamics can signal a robot's failure and examines how different types of failures affect people's perception of robot. We conducted a user study with 27 participants collaborating with a robotic mobile manipulator to solve tangram puzzles. The robot was programmed to experience two types of failures -- executional and decisional -- occurring either at the beginning or end of the task, with or without acknowledgement of the failure. Our findings reveal that the type and timing of the robot's failure significantly affect participants' gaze behaviour and perception of the robot. Specifically, executional failures led to more gaze shifts and increased focus on the robot, while decisional failures resulted in lower entropy in gaze transitions among areas of interest, particularly when the failure occurred at the end of the task. These results highlight that gaze can serve as a reliable indicator of robot failures and their types, and could also be used to predict the appropriate recovery actions.
ROSAnnotator: A Web Application for ROSBag Data Analysis in Human-Robot Interaction
Jan 13, 2025Human-robot interaction (HRI) is an interdisciplinary field that utilises both quantitative and qualitative methods. While ROSBags, a file format within the Robot Operating System (ROS), offer an efficient means of collecting temporally synched multimodal data in empirical studies with real robots, there is a lack of tools specifically designed to integrate qualitative coding and analysis functions with ROSBags. To address this gap, we developed ROSAnnotator, a web-based application that incorporates a multimodal Large Language Model (LLM) to support both manual and automated annotation of ROSBag data. ROSAnnotator currently facilitates video, audio, and transcription annotations and provides an open interface for custom ROS messages and tools. By using ROSAnnotator, researchers can streamline the qualitative analysis process, create a more cohesive analysis pipeline, and quickly access statistical summaries of annotations, thereby enhancing the overall efficiency of HRI data analysis. https://github.com/CHRI-Lab/ROSAnnotator
OfficeMate: Pilot Evaluation of an Office Assistant Robot
Jan 09, 2025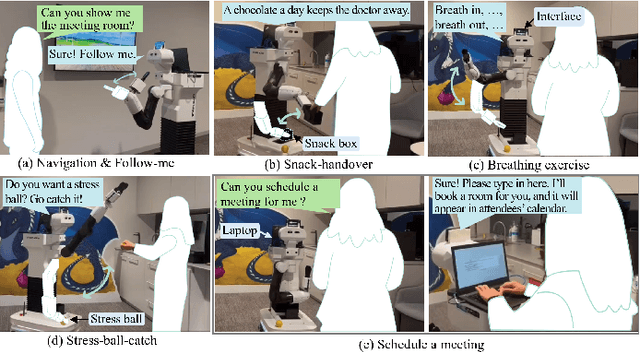
Office Assistant Robots (OARs) offer a promising solution to proactively provide in-situ support to enhance employee well-being and productivity in office spaces. We introduce OfficeMate, a social OAR designed to assist with practical tasks, foster social interaction, and promote health and well-being. Through a pilot evaluation with seven participants in an office environment, we found that users see potential in OARs for reducing stress and promoting healthy habits and value the robot's ability to provide companionship and physical activity reminders in the office space. However, concerns regarding privacy, communication, and the robot's interaction timing were also raised. The feedback highlights the need to carefully consider the robot's appearance and behaviour to ensure it enhances user experience and aligns with office social norms. We believe these insights will better inform the development of adaptive, intelligent OAR systems for future office space integration.