 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Metabolic Dysfunction-Associated Steatotic Liver Disease using Machine Learning Methods
Oct 25, 2025Background: Metabolic Dysfunction-Associated Steatotic Liver Disease (MASLD) affects ~33% of U.S. adults and is the most common chronic liver disease. Although often asymptomatic, progression can lead to cirrhosis. Early detection is important, as lifestyle interventions can prevent disease progression. We developed a fair, rigorous, and reproducible MASLD prediction model and compared it to prior methods using a large electronic health record database. Methods: We evaluated LASSO logistic regression, random forest, XGBoost, and a neural network for MASLD prediction using clinical feature subsets, including the top 10 SHAP-ranked features. To reduce disparities in true positive rates across racial and ethnic subgroups, we applied an equal opportunity postprocessing method. Results: This study included 59,492 patients in the training data, 24,198 in the validating data, and 25,188 in the testing data. The LASSO logistic regression model with the top 10 features was selected for its interpretability and comparable performance. Before fairness adjustment, the model achieved AUROC of 0.84, accuracy of 78%, sensitivity of 72%, specificity of 79%, and F1-score of 0.617. After equal opportunity postprocessing, accuracy modestly increased to 81% and specificity to 94%, while sensitivity decreased to 41% and F1-score to 0.515, reflecting the fairness trade-off. Conclusions: We developed the MASER prediction model (MASLD Static EHR Risk Prediction), a LASSO logistic regression model which achieved competitive performance for MASLD prediction (AUROC 0.836, accuracy 77.6%), comparable to previously reported ensemble and tree-based models. Overall, this approach demonstrates that interpretable models can achieve a balance of predictive performance and fairness in diverse patient populations.
MSVIPER: Improved Policy Distillation for Reinforcement-Learning-Based Robot Navigation
Sep 19, 2022
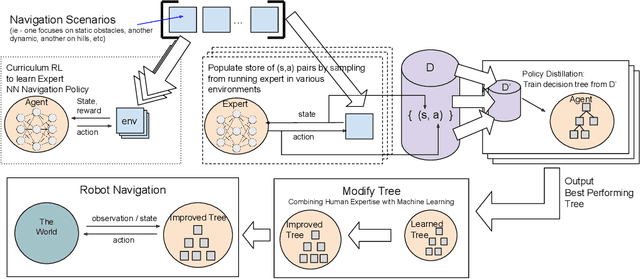
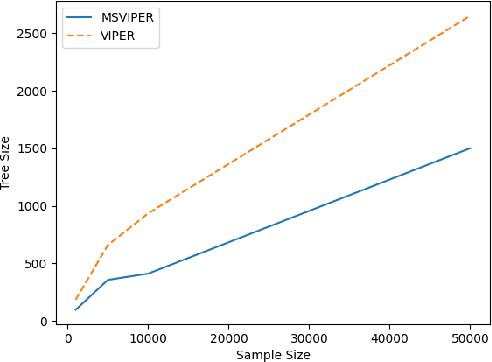
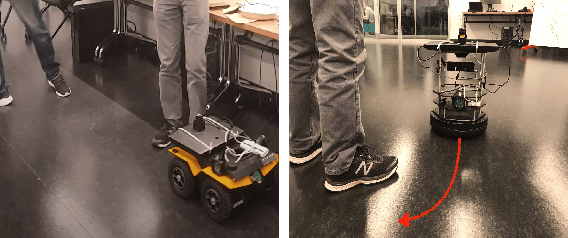
We present Multiple Scenario Verifiable Reinforcement Learning via Policy Extraction (MSVIPER), a new method for policy distillation to decision trees for improved robot navigation. MSVIPER learns an "expert" policy using any Reinforcement Learning (RL) technique involving learning a state-action mapping and then uses imitation learning to learn a decision-tree policy from it. We demonstrate that MSVIPER results in efficient decision trees and can accurately mimic the behavior of the expert policy. Moreover, we present efficient policy distillation and tree-modification techniques that take advantage of the decision tree structure to allow improvements to a policy without retraining. We use our approach to improve the performance of RL-based robot navigation algorithms for indoor and outdoor scenes. We demonstrate the benefits in terms of reduced freezing and oscillation behaviors (by up to 95\% reduction) for mobile robots navigating among dynamic obstacles and reduced vibrations and oscillation (by up to 17\%) for outdoor robot navigation on complex, uneven terrains.