 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuralPDR: Neural Differential Equations as surrogate models for Photodissociation Regions
Jun 17, 2025Computational astrochemical models are essential for helping us interpret and understand the observations of different astrophysical environments. In the age of high-resolution telescopes such as JWST and ALMA, the substructure of many objects can be resolved, raising the need for astrochemical modeling at these smaller scales, meaning that the simulations of these objects need to include both the physics and chemistry to accurately model the observations. The computational cost of the simulations coupling both the three-dimensional hydrodynamics and chemistry is enormous, creating an opportunity for surrogate models that can effectively substitute the chemical solver. In this work we present surrogate models that can replace the original chemical code, namely Latent Augmented Neural Ordinary Differential Equations. We train these surrogate architectures on three datasets of increasing physical complexity, with the last dataset derived directly from a three-dimensional simulation of a molecular cloud using a Photodissociation Region (PDR) code, 3D-PDR. We show that these surrogate models can provide speedup and reproduce the original observable column density maps of the dataset. This enables the rapid inference of the chemistry (on the GPU), allowing for the faster statistical inference of observations or increasing the resolution in hydrodynamical simulations of astrophysical environments.
3D-PDR Orion dataset and NeuralPDR: Neural Differential Equations for Photodissociation Regions
Dec 01, 2024



We present a novel dataset of simulations of the photodissociation region (PDR) in the Orion Bar and provide benchmarks of emulators for the dataset. Numerical models of PDRs are computationally expensive since the modeling of these changing regions requires resolving the thermal balance and chemical composition along a line-of-sight into an interstellar cloud. This often makes it a bottleneck for 3D simulations of these regions. In this work, we provide a dataset of 8192 models with different initial conditions simulated with 3D-PDR. We then benchmark different architectures, focusing on Augmented Neural Ordinary Differential Equation (ANODE) based models (Code be found at https://github.com/uclchem/neuralpdr). Obtaining fast and robust emulators that can be included as preconditioners of classical codes or full emulators into 3D simulations of PDRs.
Collaborative Tracking and Capture of Aerial Object using UAVs
Oct 04, 2020
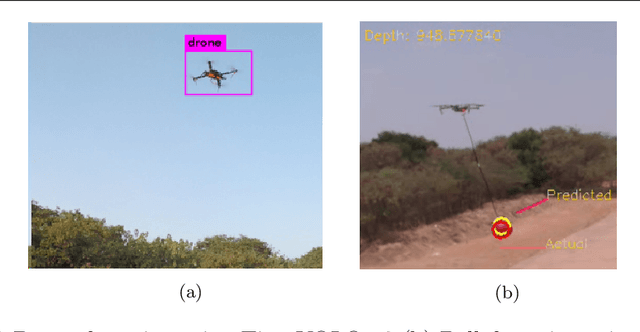
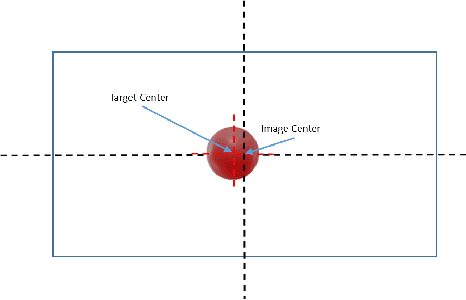
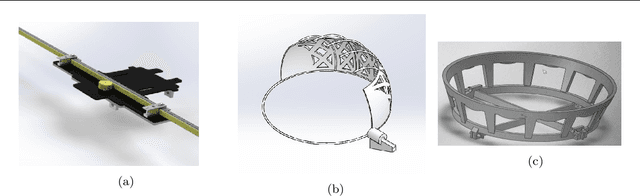
This work details the problem of aerial target capture using multiple UAVs. This problem is motivated from the challenge 1 of Mohammed Bin Zayed International Robotic Challenge 2020. The UAVs utilise visual feedback to autonomously detect target, approach it and capture without disturbing the vehicle which carries the target. Multi-UAV collaboration improves the efficiency of the system and increases the chance of capturing the ball robustly in short span of time. In this paper, the proposed architecture is validated through simulation in ROS-Gazebo environment and is further implemented on hardware.
Implementation of Survivor Detection Strategies Using Drones
Apr 04, 2020
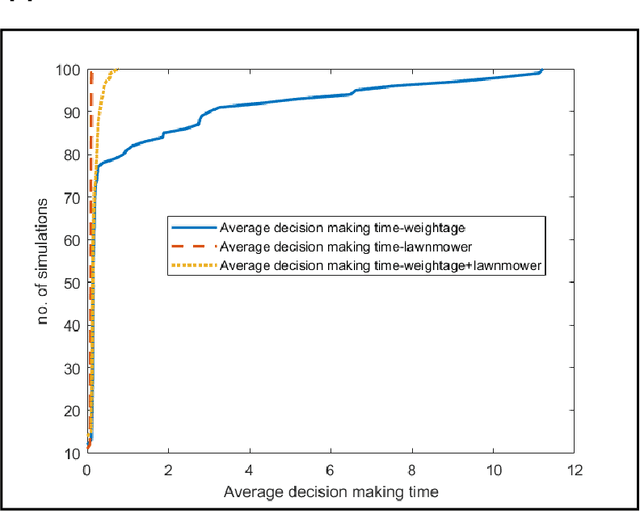
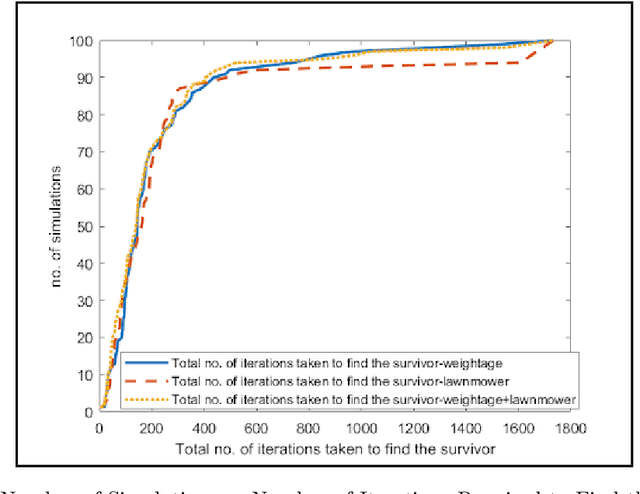
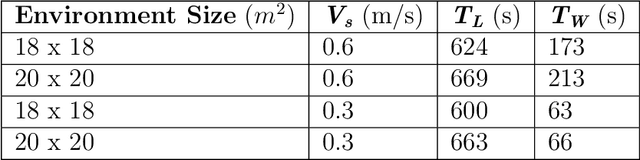
Survivors stranded during floods tend to seek refuge on dry land. It is important to search for these survivors and help them reach safety as quickly as possible. The terrain in such situations however, is heavily damaged and restricts the movement of emergency personnel towards these survivors. Therefore, it is advantageous to utilize Unmanned Aerial Vehicles (UAVs) in cooperation with on-ground first responders to aid search and rescue efforts. In this article we demonstrate an implementation and improvement of the weight-based path planning algorithm using an off-the-shelf UAV. The coordinates of the survivor and their heading is reported by an on-ground observer to the UAV to generate a weighted map of the surroundings for exploration. Each coordinate in the map is assigned a weight which dictates the priority of exploration. These waypoints are then sorted on the basis of their weights to arrive at an ordered list for exploration by the UAV. We developed the model in MATLAB, followed by prototyping on Robot Operating System (ROS) using a 3DR Iris quadcopter. We tested the model on an off-the-shelf UAV by utilizing the MAVROS and MAVLINK capabilities of ROS. During the implementation of the algorithm on the UAV, several additional factors such as unreliable GPS signals and limited field of view which could effect the performance of the model were in effect, despite which the algorithm performed fairly well. We compared our model with conventional algorithms described in the literature, and showed that our implementation outperforms them.