 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Calibration Technique for Quantitative Inversion
Mar 10, 2025Quantitative inversion algorithms allow for the reconstruction of electrical properties (such as permittivity, and conductivity) for every point in a scene. However, they are challenging to use on measured datasets due to the need to know the incident wave field in the scene. In general, this is unknown due to factors such as antenna characteristics, path loss, waveform factors, etc. In this paper, we introduce a scalar calibration factor to account for these factors. To solve for the calibration factor, we augment the inversion procedure by including the forward problem, which we solve by training a simple feed-forward fully connected neural network to learn a mapping between the underlying permittivity distribution and the scattered field at the radar. We then minimize the mismatch between the measured and simulated fields to optimize the scalar calibration factor for each transmitter. We use the Fresnel Institute dataset to test our algorithm.
What's Mine is Yours: Pretrained CNNs for Limited Training Sonar ATR
Jun 29, 2017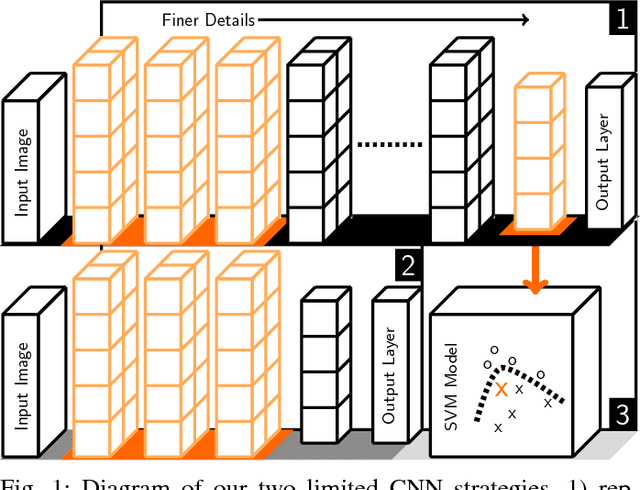
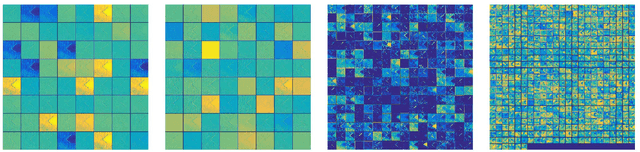
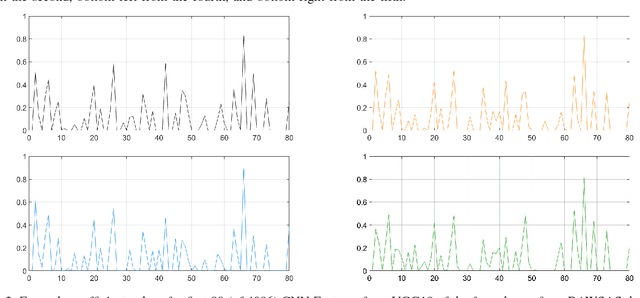
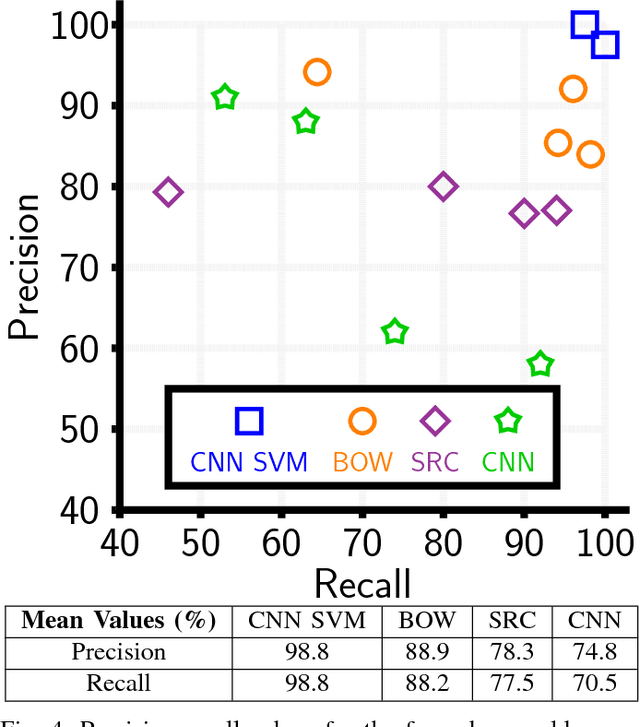
Finding mines in Sonar imagery is a significant problem with a great deal of relevance for seafaring military and commercial endeavors. Unfortunately, the lack of enormous Sonar image data sets has prevented automatic target recognition (ATR) algorithms from some of the same advances seen in other computer vision fields. Namely, the boom in convolutional neural nets (CNNs) which have been able to achieve incredible results - even surpassing human actors - has not been an easily feasible route for many practitioners of Sonar ATR. We demonstrate the power of one avenue to incorporating CNNs into Sonar ATR: transfer learning. We first show how well a straightforward, flexible CNN feature-extraction strategy can be used to obtain impressive if not state-of-the-art results. Secondly, we propose a way to utilize the powerful transfer learning approach towards multiple instance target detection and identification within a provided synthetic aperture Sonar data set.
Using Frame Theoretic Convolutional Gridding for Robust Synthetic Aperture Sonar Imaging
Jun 26, 2017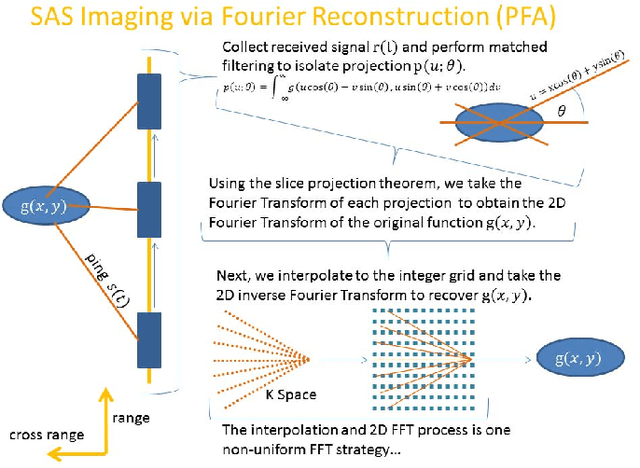
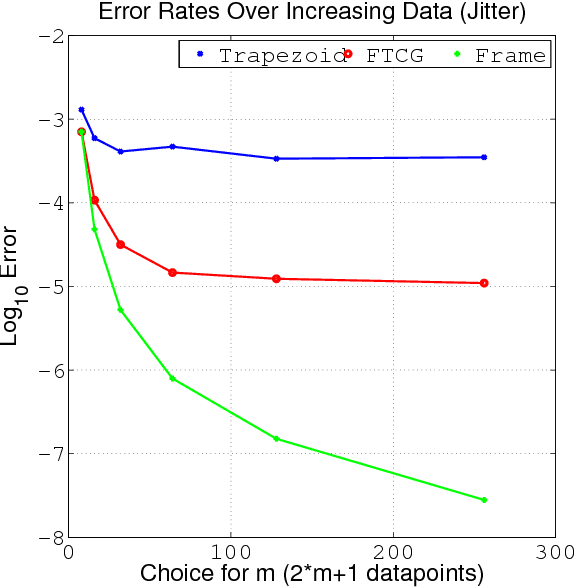
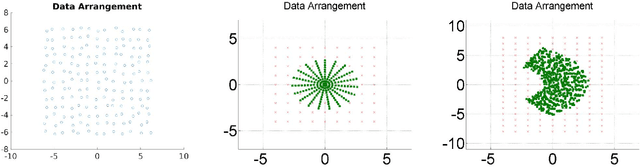
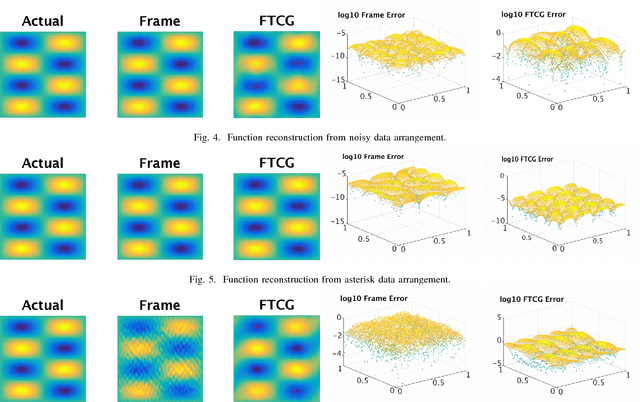
Recent progress in synthetic aperture sonar (SAS) technology and processing has led to significant advances in underwater imaging, outperforming previously common approaches in both accuracy and efficiency. There are, however, inherent limitations to current SAS reconstruction methodology. In particular, popular and efficient Fourier domain SAS methods require a 2D interpolation which is often ill conditioned and inaccurate, inevitably reducing robustness with regard to speckle and inaccurate sound-speed estimation. To overcome these issues, we propose using the frame theoretic convolution gridding (FTCG) algorithm to handle the non-uniform Fourier data. FTCG extends upon non-uniform fast Fourier transform (NUFFT) algorithms by casting the NUFFT as an approximation problem given Fourier frame data. The FTCG has been show to yield improved accuracy at little more computational cost. Using simulated data, we outline how the FTCG can be used to enhance current SAS processing.
Localized Dictionary design for Geometrically Robust Sonar ATR
Jan 13, 2016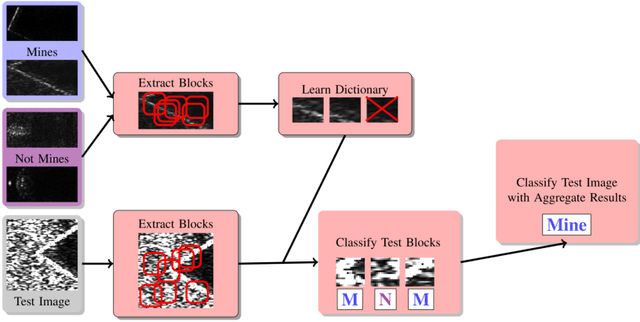
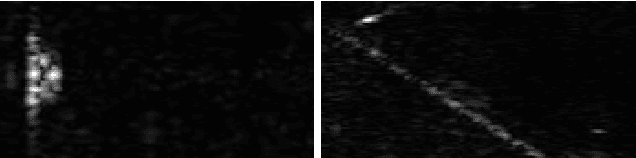
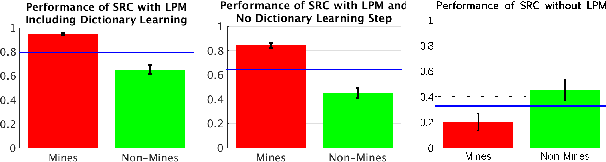
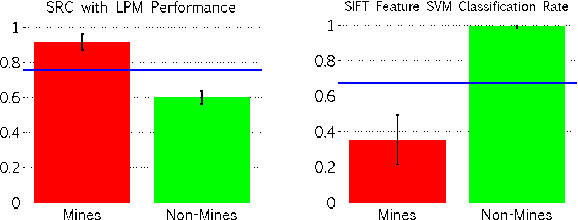
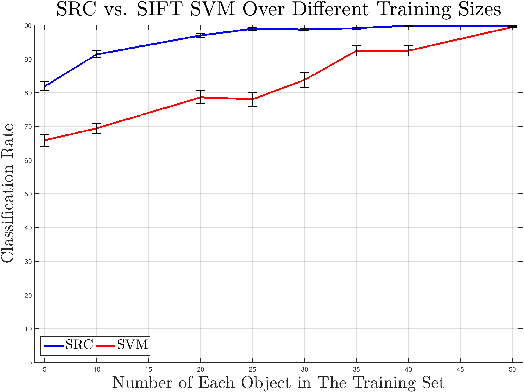
Advancements in Sonar image capture have opened the door to powerful classification schemes for automatic target recognition (ATR. Recent work has particularly seen the application of sparse reconstruction-based classification (SRC) to sonar ATR, which provides compelling accuracy rates even in the presence of noise and blur. Existing sparsity based sonar ATR techniques however assume that the test images exhibit geometric pose that is consistent with respect to the training set. This work addresses the outstanding open challenge of handling inconsistently posed test sonar images relative to training. We develop a new localized block-based dictionary design that can enable geometric, i.e. pose robustness. Further, a dictionary learning method is incorporated to increase performance and efficiency. The proposed SRC with Localized Pose Management (LPM), is shown to outperform the state of the art SIFT feature and SVM approach, due to its power to discern background clutter in Sonar images.
Discriminative Sparsity for Sonar ATR
Jan 01, 2016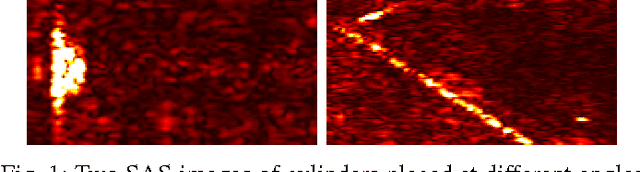
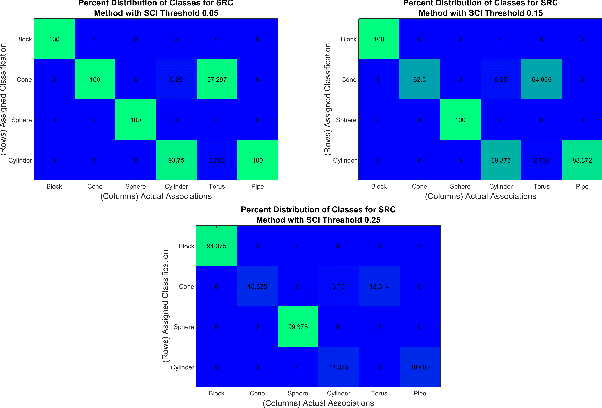

Advancements in Sonar image capture have enabled researchers to apply sophisticated object identification algorithms in order to locate targets of interest in images such as mines. Despite progress in this field, modern sonar automatic target recognition (ATR) approaches lack robustness to the amount of noise one would expect in real-world scenarios, the capability to handle blurring incurred from the physics of image capture, and the ability to excel with relatively few training samples. We address these challenges by adapting modern sparsity-based techniques with dictionaries comprising of training from each class. We develop new discriminative (as opposed to generative) sparse representations which can help automatically classify targets in Sonar imaging. Using a simulated SAS data set from the Naval Surface Warfare Center (NSWC), we obtained compelling classification rates for multi-class problems even in cases with considerable noise and sparsity in training samples.