 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Autonomous Instrument Tray Assembly for Sterile Processing Applications
Feb 02, 2026The Sterile Processing and Distribution (SPD) department is responsible for cleaning, disinfecting, inspecting, and assembling surgical instruments between surgeries. Manual inspection and preparation of instrument trays is a time-consuming, error-prone task, often prone to contamination and instrument breakage. In this work, we present a fully automated robotic system that sorts and structurally packs surgical instruments into sterile trays, focusing on automation of the SPD assembly stage. A custom dataset comprising 31 surgical instruments and 6,975 annotated images was collected to train a hybrid perception pipeline using YOLO12 for detection and a cascaded ResNet-based model for fine-grained classification. The system integrates a calibrated vision module, a 6-DOF Staubli TX2-60L robotic arm with a custom dual electromagnetic gripper, and a rule-based packing algorithm that reduces instrument collisions during transport. The packing framework uses 3D printed dividers and holders to physically isolate instruments, reducing collision and friction during transport. Experimental evaluations show high perception accuracy and statistically significant reduction in tool-to-tool collisions compared to human-assembled trays. This work serves as the scalable first step toward automating SPD workflows, improving safety, and consistency of surgical preparation while reducing SPD processing times.
Mechatronics-Driven Musical Expressivity for Robotic Percussionists
Jul 29, 2020
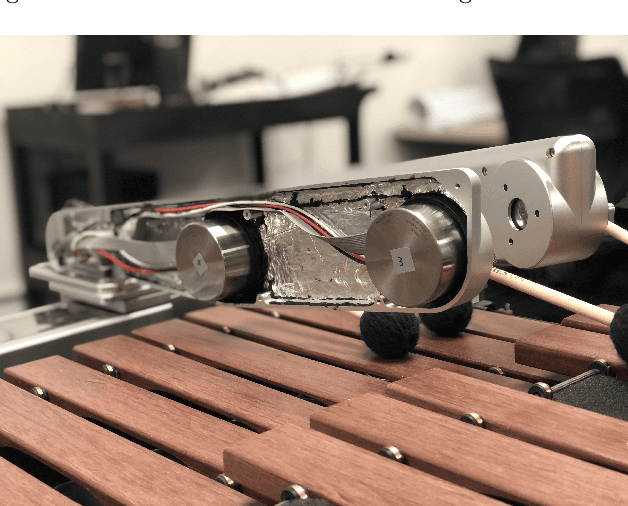
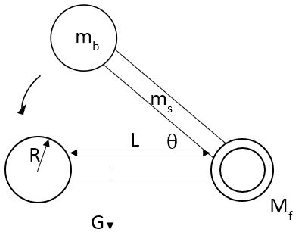

Musical expressivity is an important aspect of musical performance for humans as well as robotic musicians. We present a novel mechatronics-driven implementation of Brushless Direct Current (BLDC) motors in a robotic marimba player, named Shimon, designed to improve speed, dynamic range (loudness), and ultimately perceived musical expressivity in comparison to state-of-the-art robotic percussionist actuators. In an objective test of dynamic range, we find that our implementation provides wider and more consistent dynamic range response in comparison with solenoid-based robotic percussionists. Our implementation also outperforms both solenoid and human marimba players in striking speed. In a subjective listening test measuring musical expressivity, our system performs significantly better than a solenoid-based system and is statistically indistinguishable from human performers.