 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Risk-Aware Tracking of Multiple Targets
Aug 04, 2022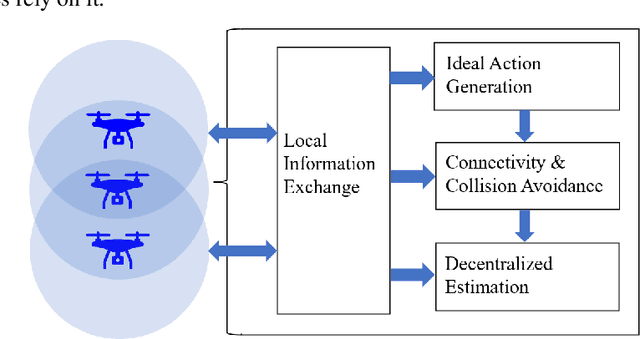
We consider the setting where a team of robots is tasked with tracking multiple targets with the following property: approaching the targets enables more accurate target position estimation, but also increases the risk of sensor failures. Therefore, it is essential to address the trade-off between tracking quality maximization and risk minimization. In our previous work, a centralized controller is developed to plan motions for all the robots -- however, this is not a scalable approach. Here, we present a decentralized and risk-aware multi-target tracking framework, in which each robot plans its motion trading off tracking accuracy maximization and aversion to risk, while only relying on its own information and information exchanged with its neighbors. We use the control barrier function to guarantee network connectivity throughout the tracking process. Extensive numerical experiments demonstrate that our system can achieve similar tracking accuracy and risk-awareness to its centralized counterpart.