 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-Domain Lifelong Reinforcement Learning for Wireless Sensor Networks
Aug 25, 2025Wireless sensor networks (WSNs) with energy harvesting (EH) are expected to play a vital role in intelligent 6G systems, especially in industrial sensing and control, where continuous operation and sustainable energy use are critical. Given limited energy resources, WSNs must operate efficiently to ensure long-term performance. Their deployment, however, is challenged by dynamic environments where EH conditions, network scale, and traffic rates change over time. In this work, we address system dynamics that yield different learning tasks, where decision variables remain fixed but strategies vary, as well as learning domains, where both decision space and strategies evolve. To handle such scenarios, we propose a cross-domain lifelong reinforcement learning (CD-L2RL) framework for energy-efficient WSN design. Our CD-L2RL algorithm leverages prior experience to accelerate adaptation across tasks and domains. Unlike conventional approaches based on Markov decision processes or Lyapunov optimization, which assume relatively stable environments, our solution achieves rapid policy adaptation by reusing knowledge from past tasks and domains to ensure continuous operations. We validate the approach through extensive simulations under diverse conditions. Results show that our method improves adaptation speed by up to 35% over standard reinforcement learning and up to 70% over Lyapunov-based optimization, while also increasing total harvested energy. These findings highlight the strong potential of CD-L2RL for deployment in dynamic 6G WSNs.
Zero-Shot Generalization for Blockage Localization in mmWave Communication
Dec 18, 2024



This paper introduces a novel method for predicting blockages in millimeter-wave (mmWave) communication systems towards enabling reliable connectivity. It employs a self-supervised learning approach to label radio frequency (RF) data with the locations of blockage-causing objects extracted from light detection and ranging (LiDAR) data, which is then used to train a deep learning model that predicts object`s location only using RF data. Then, the predicted location is utilized to predict blockages, enabling adaptability without retraining when transmitter-receiver positions change. Evaluations demonstrate up to 74% accuracy in predicting blockage locations in dynamic environments, showcasing the robustness of the proposed solution.
Real-Time Remote Control via VR over Limited Wireless Connectivity
Jun 25, 2024This work introduces a solution to enhance human-robot interaction over limited wireless connectivity. The goal is toenable remote control of a robot through a virtual reality (VR)interface, ensuring a smooth transition to autonomous mode in the event of connectivity loss. The VR interface provides accessto a dynamic 3D virtual map that undergoes continuous updatesusing real-time sensor data collected and transmitted by therobot. Furthermore, the robot monitors wireless connectivity and automatically switches to a autonomous mode in scenarios with limited connectivity. By integrating four key functionalities: real-time mapping, remote control through glasses VR, continuous monitoring of wireless connectivity, and autonomous navigation during limited connectivity, we achieve seamless end-to-end operation.
Maze Discovery using Multiple Robots via Federated Learning
Jun 25, 2024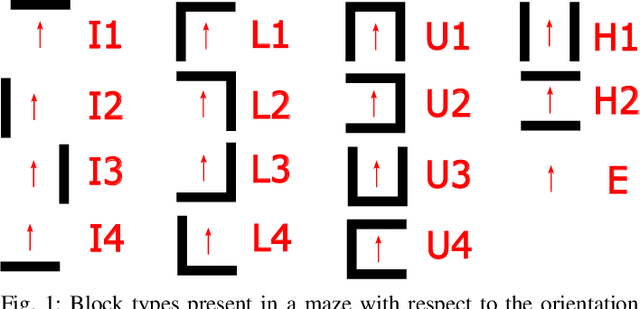



This work presents a use case of federated learning (FL) applied to discovering a maze with LiDAR sensors-equipped robots. Goal here is to train classification models to accurately identify the shapes of grid areas within two different square mazes made up with irregular shaped walls. Due to the use of different shapes for the walls, a classification model trained in one maze that captures its structure does not generalize for the other. This issue is resolved by adopting FL framework between the robots that explore only one maze so that the collective knowledge allows them to operate accurately in the unseen maze. This illustrates the effectiveness of FL in real-world applications in terms of enhancing classification accuracy and robustness in maze discovery tasks.
Decentralized RL-Based Data Transmission Scheme for Energy Efficient Harvesting
Jun 24, 2024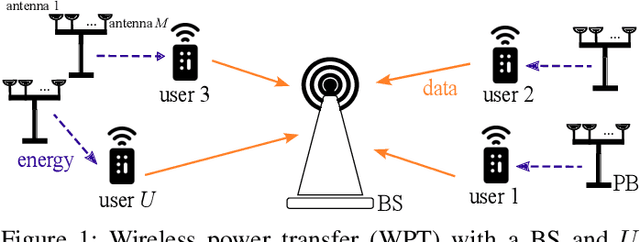
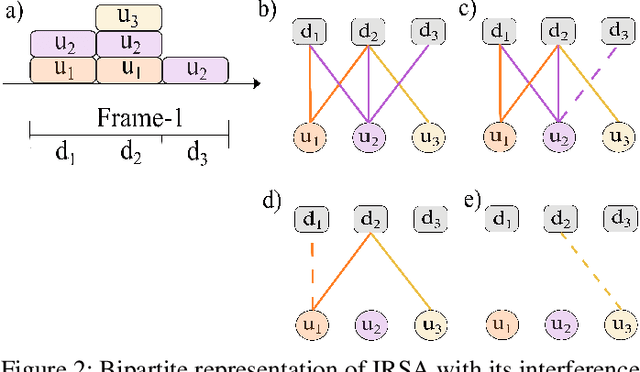
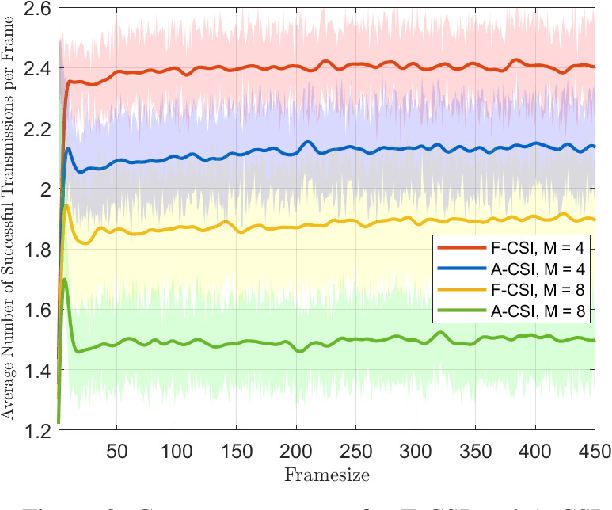
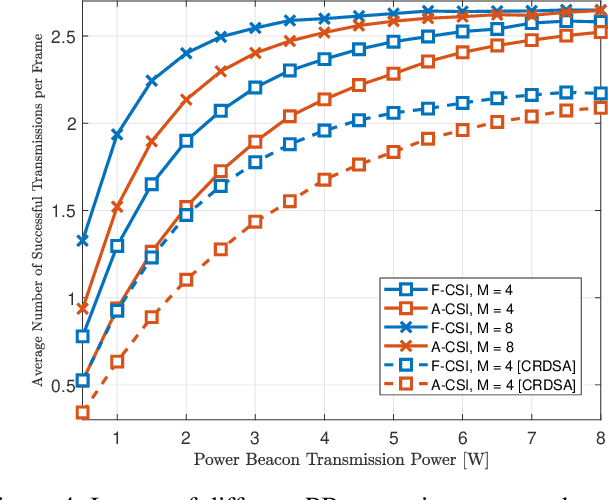
The evolving landscape of the Internet of Things (IoT) has given rise to a pressing need for an efficient communication scheme. As the IoT user ecosystem continues to expand, traditional communication protocols grapple with substantial challenges in meeting its burgeoning demands, including energy consumption, scalability, data management, and interference. In response to this, the integration of wireless power transfer and data transmission has emerged as a promising solution. This paper considers an energy harvesting (EH)-oriented data transmission scheme, where a set of users are charged by their own multi-antenna power beacon (PB) and subsequently transmits data to a base station (BS) using an irregular slotted aloha (IRSA) channel access protocol. We propose a closed-form expression to model energy consumption for the present scheme, employing average channel state information (A-CSI) beamforming in the wireless power channel. Subsequently, we employ the reinforcement learning (RL) methodology, wherein every user functions as an agent tasked with the goal of uncovering their most effective strategy for replicating transmissions. This strategy is devised while factoring in their energy constraints and the maximum number of packets they need to transmit. Our results underscore the viability of this solution, particularly when the PB can be strategically positioned to ensure a strong line-of-sight connection with the user, highlighting the potential benefits of optimal deployment.
Resource Optimization for Tail-Based Control in Wireless Networked Control Systems
Jun 20, 2024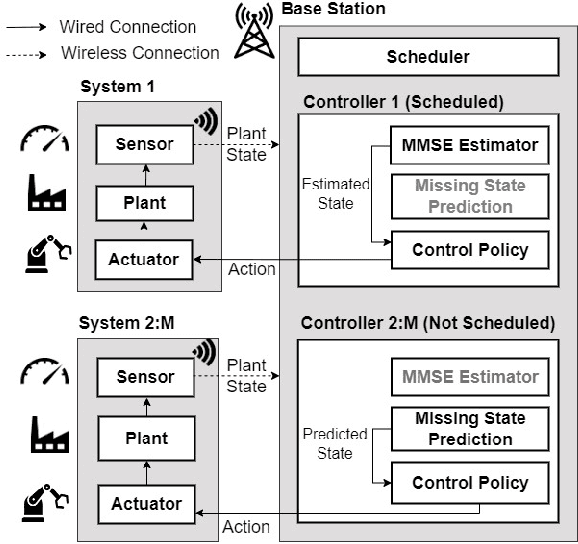
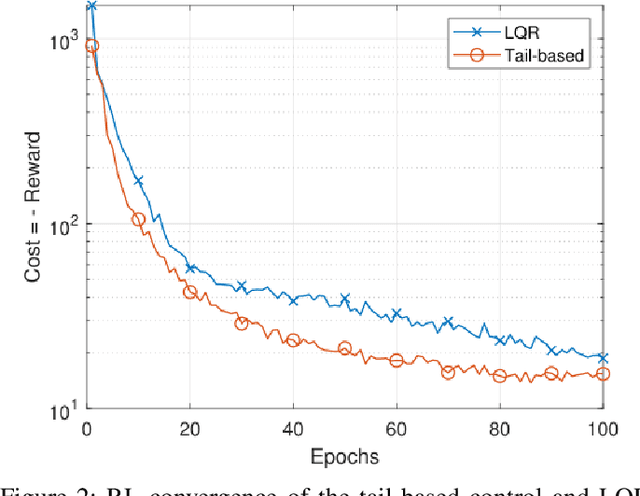
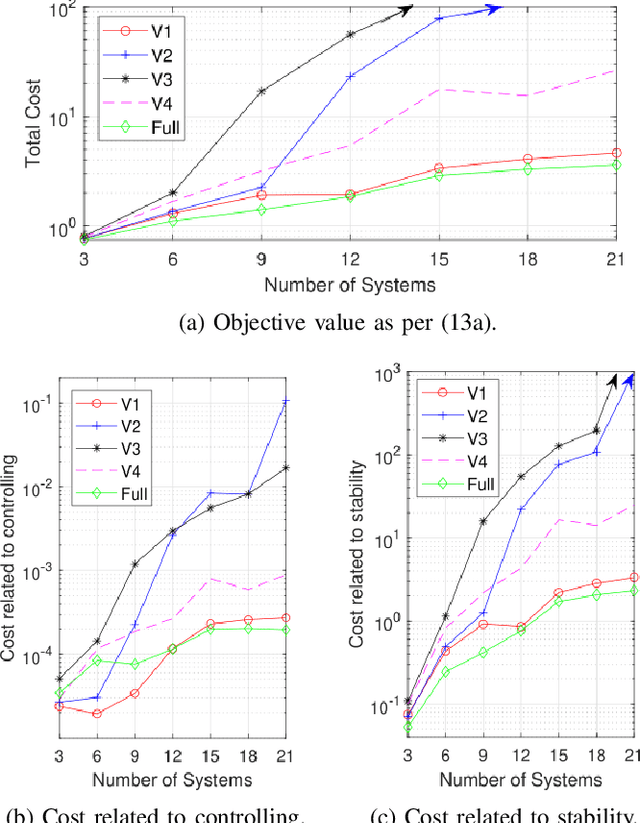
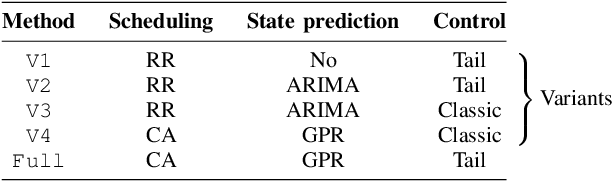
Achieving control stability is one of the key design challenges of scalable Wireless Networked Control Systems (WNCS) under limited communication and computing resources. This paper explores the use of an alternative control concept defined as tail-based control, which extends the classical Linear Quadratic Regulator (LQR) cost function for multiple dynamic control systems over a shared wireless network. We cast the control of multiple control systems as a network-wide optimization problem and decouple it in terms of sensor scheduling, plant state prediction, and control policies. Toward this, we propose a solution consisting of a scheduling algorithm based on Lyapunov optimization for sensing, a mechanism based on Gaussian Process Regression (GPR) for state prediction and uncertainty estimation, and a control policy based on Reinforcement Learning (RL) to ensure tail-based control stability. A set of discrete time-invariant mountain car control systems is used to evaluate the proposed solution and is compared against four variants that use state-of-the-art scheduling, prediction, and control methods. The experimental results indicate that the proposed method yields 22% reduction in overall cost in terms of communication and control resource utilization compared to state-of-the-art methods.