 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResource Optimization for Tail-Based Control in Wireless Networked Control Systems
Paper and Code
Jun 20, 2024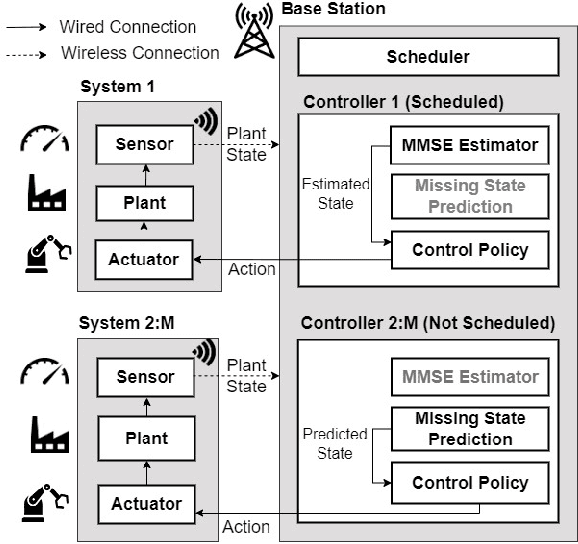
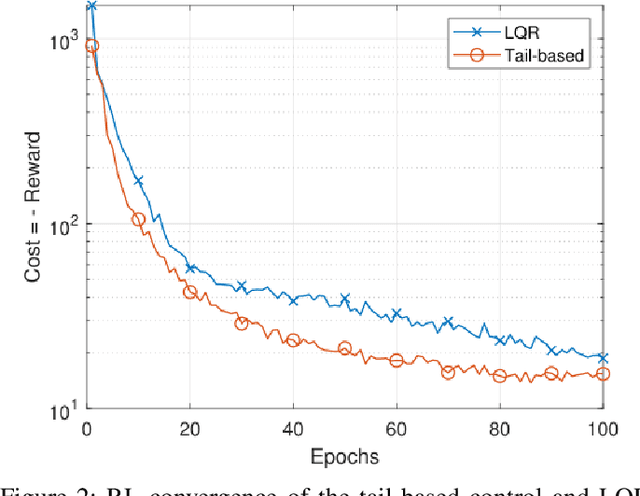
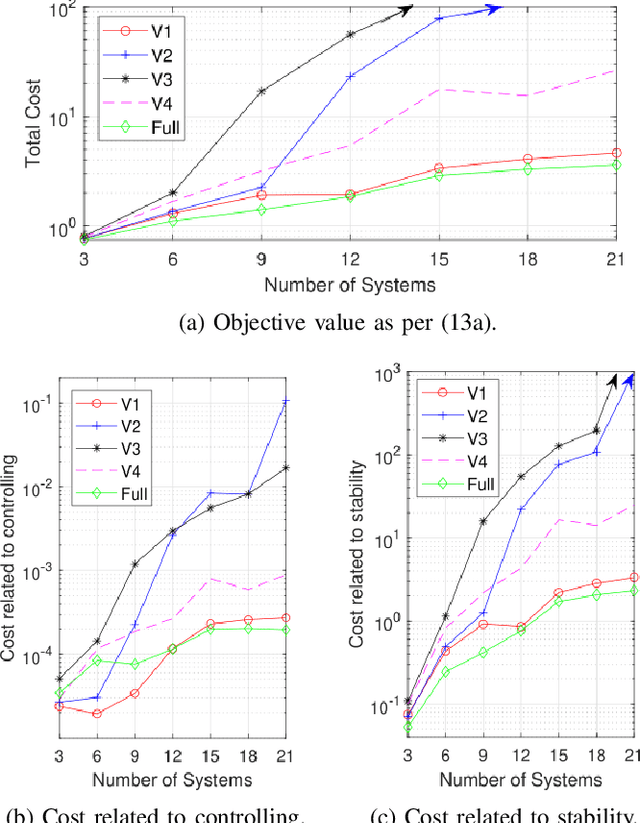
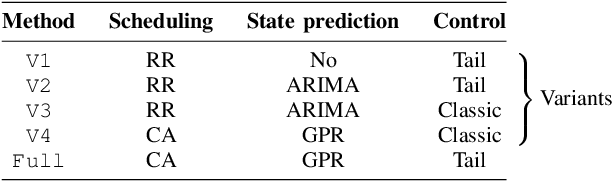
Achieving control stability is one of the key design challenges of scalable Wireless Networked Control Systems (WNCS) under limited communication and computing resources. This paper explores the use of an alternative control concept defined as tail-based control, which extends the classical Linear Quadratic Regulator (LQR) cost function for multiple dynamic control systems over a shared wireless network. We cast the control of multiple control systems as a network-wide optimization problem and decouple it in terms of sensor scheduling, plant state prediction, and control policies. Toward this, we propose a solution consisting of a scheduling algorithm based on Lyapunov optimization for sensing, a mechanism based on Gaussian Process Regression (GPR) for state prediction and uncertainty estimation, and a control policy based on Reinforcement Learning (RL) to ensure tail-based control stability. A set of discrete time-invariant mountain car control systems is used to evaluate the proposed solution and is compared against four variants that use state-of-the-art scheduling, prediction, and control methods. The experimental results indicate that the proposed method yields 22% reduction in overall cost in terms of communication and control resource utilization compared to state-of-the-art methods.