 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat should AI see? Using the Public's Opinion to Determine the Perception of an AI
Jun 09, 2022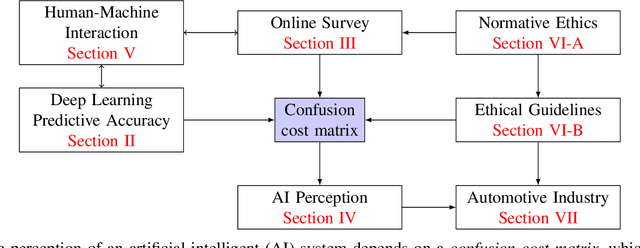
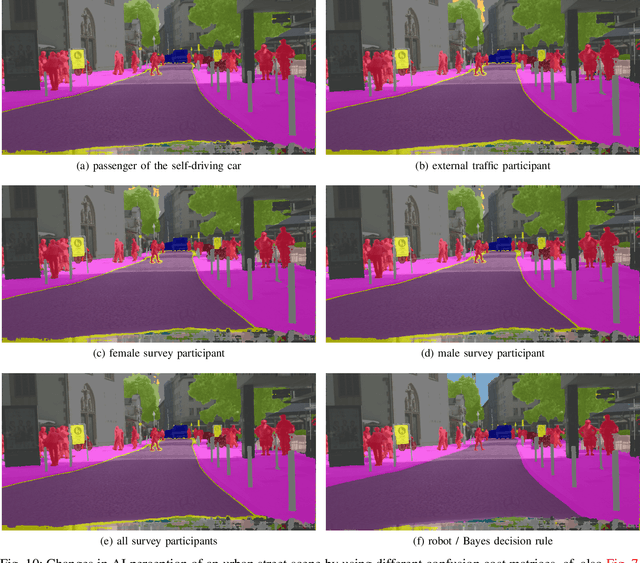
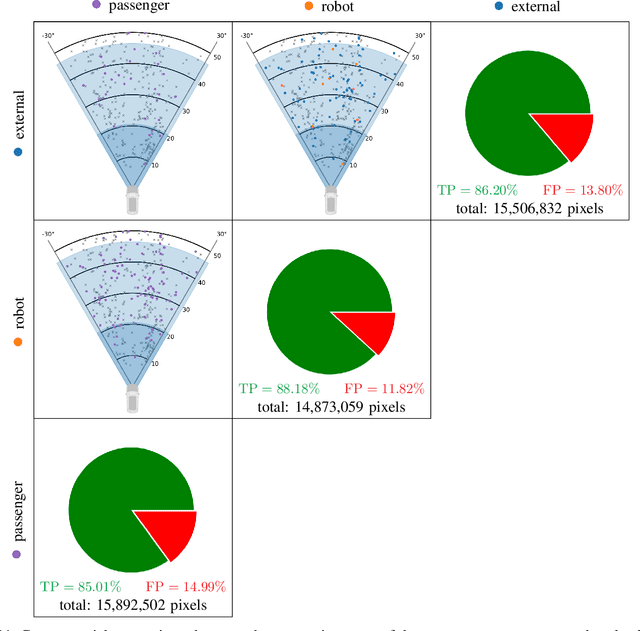
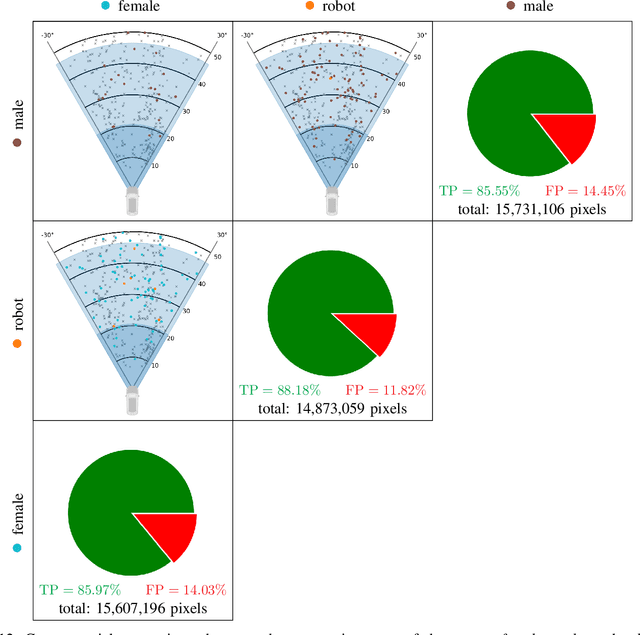
Deep neural networks (DNN) have made impressive progress in the interpretation of image data, so that it is conceivable and to some degree realistic to use them in safety critical applications like automated driving. From an ethical standpoint, the AI algorithm should take into account the vulnerability of objects or subjects on the street that ranges from "not at all", e.g. the road itself, to "high vulnerability" of pedestrians. One way to take this into account is to define the cost of confusion of one semantic category with another and use cost-based decision rules for the interpretation of probabilities, which are the output of DNNs. However, it is an open problem how to define the cost structure, who should be in charge to do that, and thereby define what AI-algorithms will actually "see". As one possible answer, we follow a participatory approach and set up an online survey to ask the public to define the cost structure. We present the survey design and the data acquired along with an evaluation that also distinguishes between perspective (car passenger vs. external traffic participant) and gender. Using simulation based $F$-tests, we find highly significant differences between the groups. These differences have consequences on the reliable detection of pedestrians in a safety critical distance to the self-driving car. We discuss the ethical problems that are related to this approach and also discuss the problems emerging from human-machine interaction through the survey from a psychological point of view. Finally, we include comments from industry leaders in the field of AI safety on the applicability of survey based elements in the design of AI functionalities in automated driving.
The Ethical Dilemma when Setting up Cost-based Decision Rules in Semantic Segmentation
Jul 02, 2019
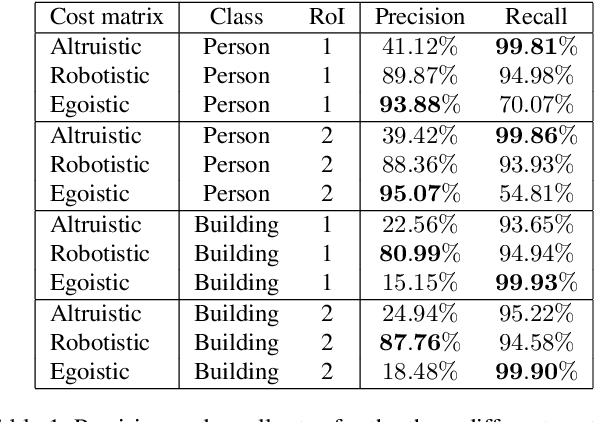
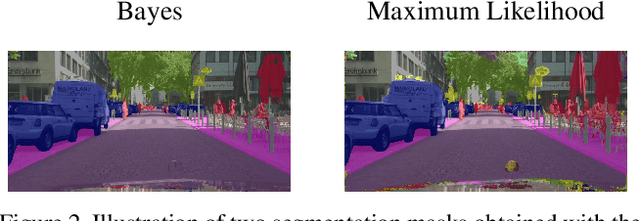
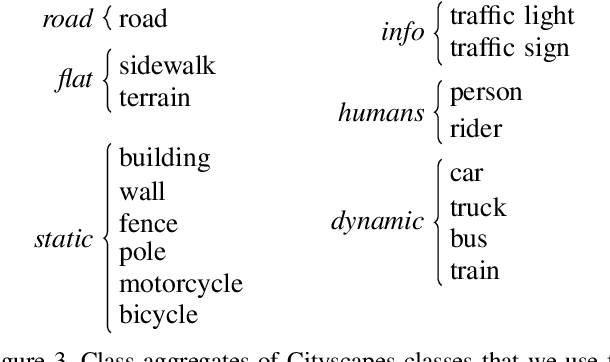
Neural networks for semantic segmentation can be seen as statistical models that provide for each pixel of one image a probability distribution on predefined classes. The predicted class is then usually obtained by the maximum a-posteriori probability (MAP) which is known as Bayes rule in decision theory. From decision theory we also know that the Bayes rule is optimal regarding the simple symmetric cost function. Therefore, it weights each type of confusion between two different classes equally, e.g., given images of urban street scenes there is no distinction in the cost function if the network confuses a person with a street or a building with a tree. Intuitively, there might be confusions of classes that are more important to avoid than others. In this work, we want to raise awareness of the possibility of explicitly defining confusion costs and the associated ethical difficulties if it comes down to providing numbers. We define two cost functions from different extreme perspectives, an egoistic and an altruistic one, and show how safety relevant quantities like precision / recall and (segment-wise) false positive / negative rate change when interpolating between MAP, egoistic and altruistic decision rules.