 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to predict metal deformations in hot-rolling processes
Jul 22, 2020
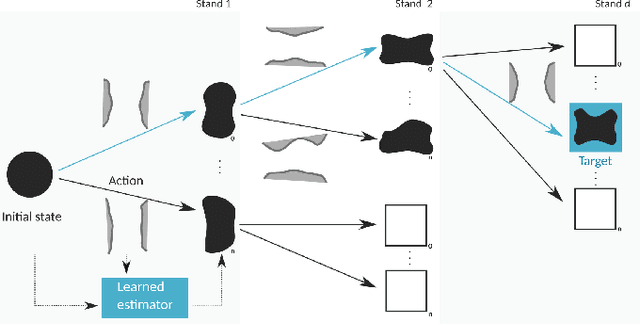


Hot-rolling is a metal forming process that produces a workpiece with a desired target cross-section from an input workpiece through a sequence of plastic deformations; each deformation is generated by a stand composed of opposing rolls with a specific geometry. In current practice, the rolling sequence (i.e., the sequence of stands and the geometry of their rolls) needed to achieve a given final cross-section is designed by experts based on previous experience, and iteratively refined in a costly trial-and-error process. Finite Element Method simulations are increasingly adopted to make this process more efficient and to test potential rolling sequences, achieving good accuracy at the cost of long simulation times, limiting the practical use of the approach. We propose a supervised learning approach to predict the deformation of a given workpiece by a set of rolls with a given geometry; the model is trained on a large dataset of procedurally-generated FEM simulations, which we publish as supplementary material. The resulting predictor is four orders of magnitude faster than simulations, and yields an average Jaccard Similarity Index of 0.972 (against ground truth from simulations) and 0.925 (against real-world measured deformations); we additionally report preliminary results on using the predictor for automatic planning of rolling sequences.
Learning Ground Traversability from Simulations
Feb 18, 2019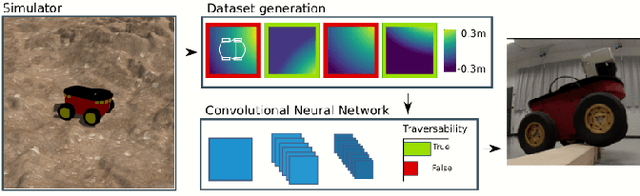

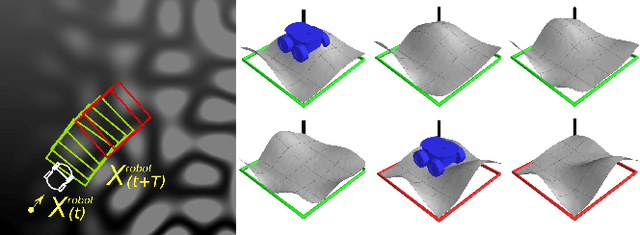
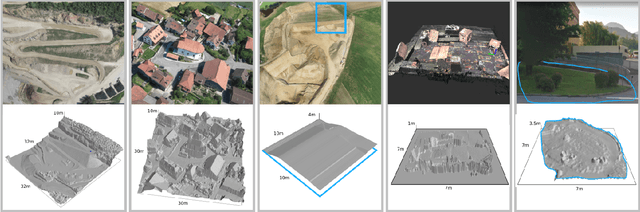
Mobile ground robots operating on unstructured terrain must predict which areas of the environment they are able to pass in order to plan feasible paths. We address traversability estimation as a heightmap classification problem: we build a convolutional neural network that, given an image representing the heightmap of a terrain patch, predicts whether the robot will be able to traverse such patch from left to right. The classifier is trained for a specific robot model (wheeled, tracked, legged, snake-like) using simulation data on procedurally generated training terrains; the trained classifier can be applied to unseen large heightmaps to yield oriented traversability maps, and then plan traversable paths. We extensively evaluate the approach in simulation on six real-world elevation datasets, and run a real-robot validation in one indoor and one outdoor environment.
* Webpage: http://romarcg.xyz/traversability_estimation/
Learning Long-Range Perception Using Self-Supervision from Short-Range Sensors and Odometry
Jan 17, 2019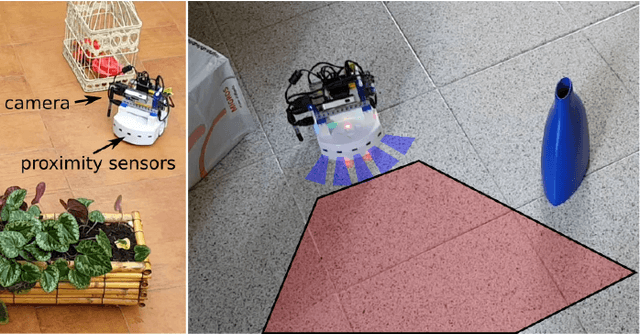
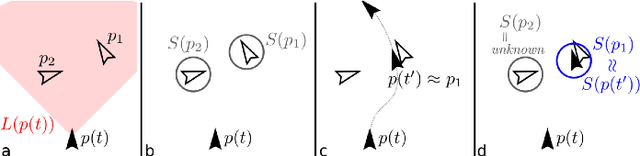
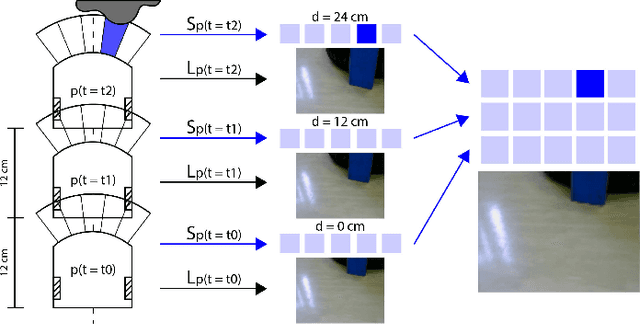
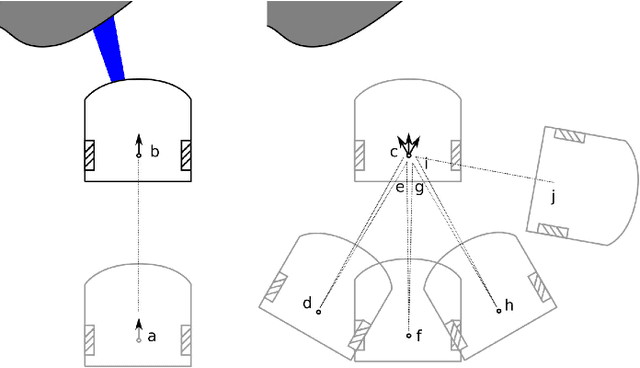
We introduce a general self-supervised approach to predict the future outputs of a short-range sensor (such as a proximity sensor) given the current outputs of a long-range sensor (such as a camera); we assume that the former is directly related to some piece of information to be perceived (such as the presence of an obstacle in a given position), whereas the latter is information-rich but hard to interpret directly. We instantiate and implement the approach on a small mobile robot to detect obstacles at various distances using the video stream of the robot's forward-pointing camera, by training a convolutional neural network on automatically-acquired datasets. We quantitatively evaluate the quality of the predictions on unseen scenarios, qualitatively evaluate robustness to different operating conditions, and demonstrate usage as the sole input of an obstacle-avoidance controller. We additionally instantiate the approach on a different simulated scenario with complementary characteristics, to exemplify the generality of our contribution.