 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Ground Traversability from Simulations
Paper and Code
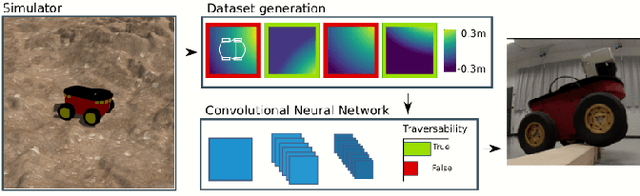

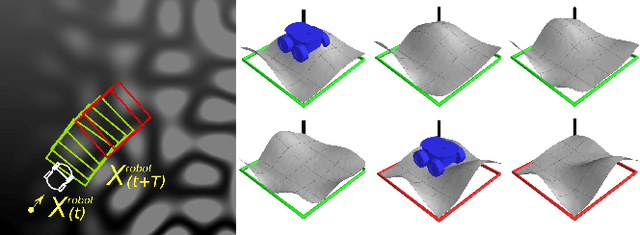
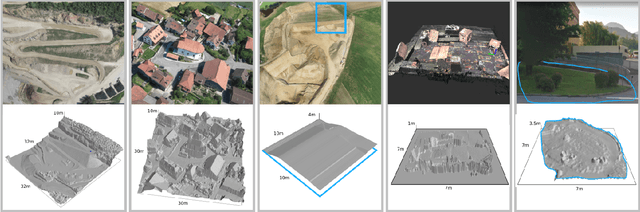
Mobile ground robots operating on unstructured terrain must predict which areas of the environment they are able to pass in order to plan feasible paths. We address traversability estimation as a heightmap classification problem: we build a convolutional neural network that, given an image representing the heightmap of a terrain patch, predicts whether the robot will be able to traverse such patch from left to right. The classifier is trained for a specific robot model (wheeled, tracked, legged, snake-like) using simulation data on procedurally generated training terrains; the trained classifier can be applied to unseen large heightmaps to yield oriented traversability maps, and then plan traversable paths. We extensively evaluate the approach in simulation on six real-world elevation datasets, and run a real-robot validation in one indoor and one outdoor environment.