 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Ground Traversability from Simulations
Feb 18, 2019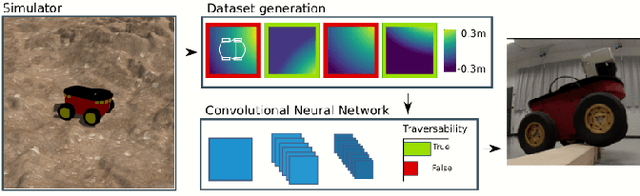

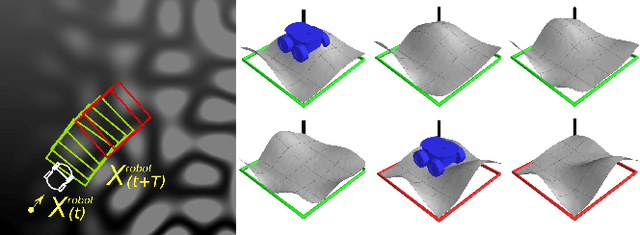
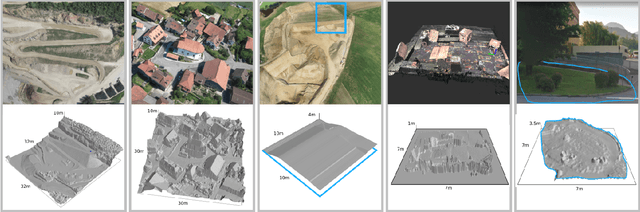
Mobile ground robots operating on unstructured terrain must predict which areas of the environment they are able to pass in order to plan feasible paths. We address traversability estimation as a heightmap classification problem: we build a convolutional neural network that, given an image representing the heightmap of a terrain patch, predicts whether the robot will be able to traverse such patch from left to right. The classifier is trained for a specific robot model (wheeled, tracked, legged, snake-like) using simulation data on procedurally generated training terrains; the trained classifier can be applied to unseen large heightmaps to yield oriented traversability maps, and then plan traversable paths. We extensively evaluate the approach in simulation on six real-world elevation datasets, and run a real-robot validation in one indoor and one outdoor environment.
* Webpage: http://romarcg.xyz/traversability_estimation/
Learning Long-Range Perception Using Self-Supervision from Short-Range Sensors and Odometry
Jan 17, 2019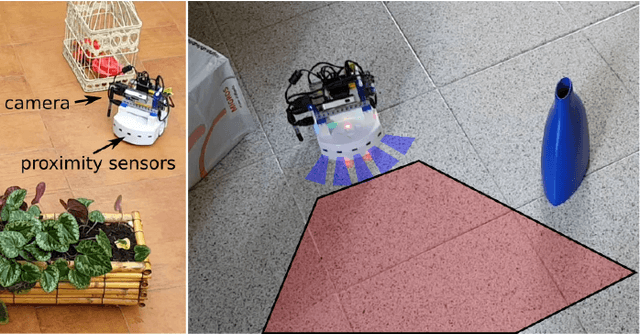
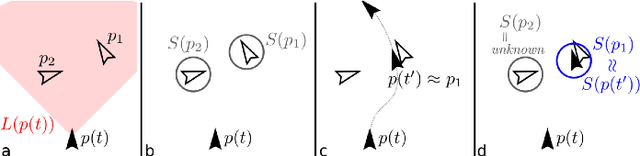
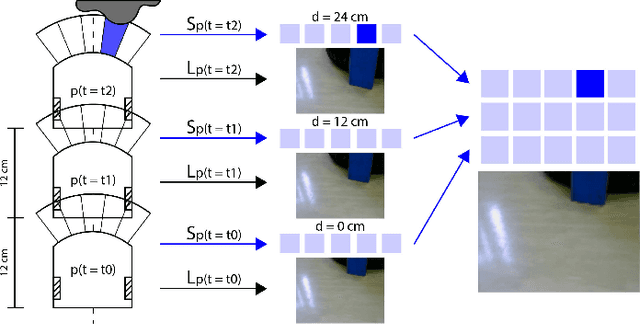
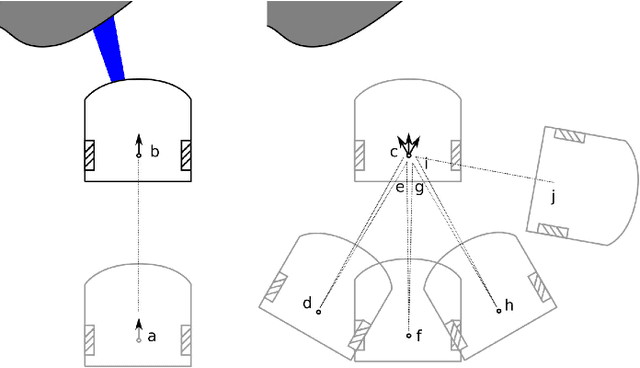
We introduce a general self-supervised approach to predict the future outputs of a short-range sensor (such as a proximity sensor) given the current outputs of a long-range sensor (such as a camera); we assume that the former is directly related to some piece of information to be perceived (such as the presence of an obstacle in a given position), whereas the latter is information-rich but hard to interpret directly. We instantiate and implement the approach on a small mobile robot to detect obstacles at various distances using the video stream of the robot's forward-pointing camera, by training a convolutional neural network on automatically-acquired datasets. We quantitatively evaluate the quality of the predictions on unseen scenarios, qualitatively evaluate robustness to different operating conditions, and demonstrate usage as the sole input of an obstacle-avoidance controller. We additionally instantiate the approach on a different simulated scenario with complementary characteristics, to exemplify the generality of our contribution.