 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-robot Cooperative Box-pushing problem using Multi-objective Particle Swarm Optimization Technique
May 03, 2012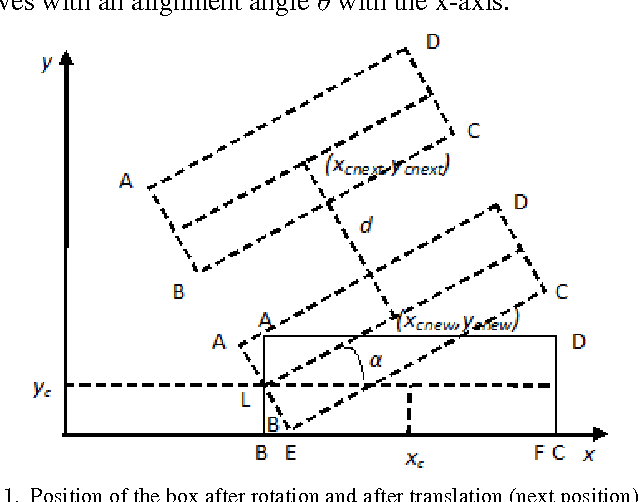
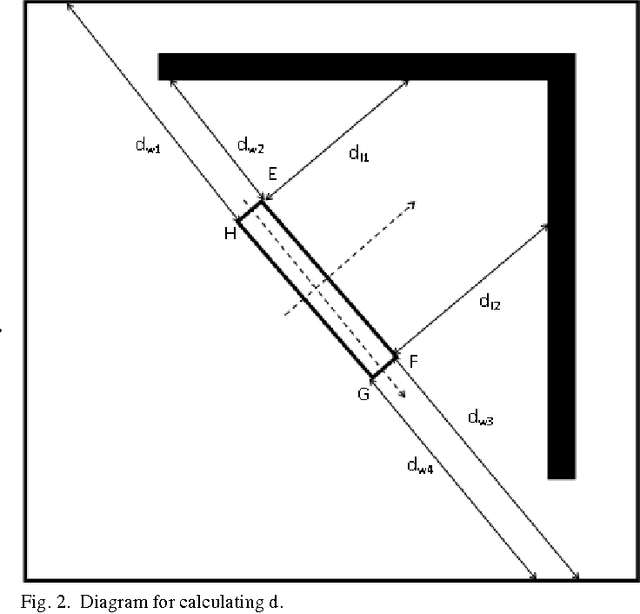
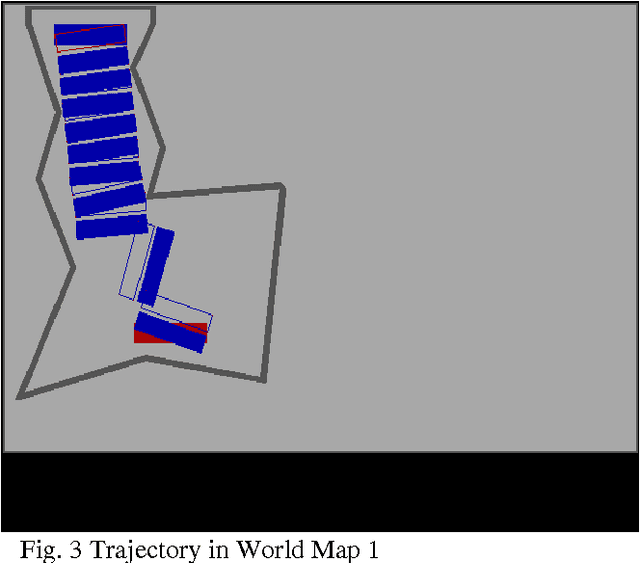
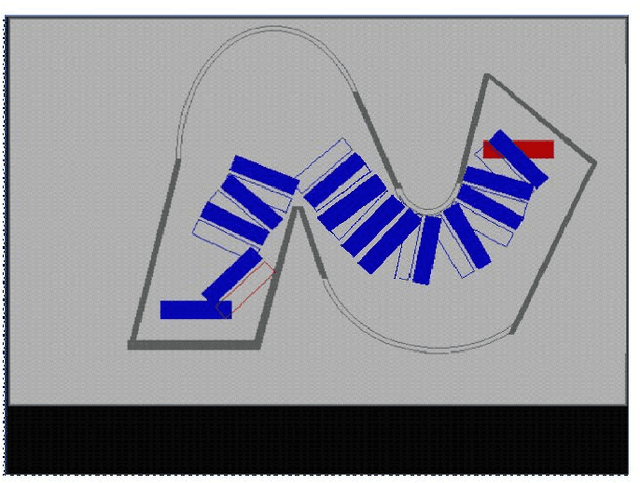
The present work provides a new approach to solve the well-known multi-robot co-operative box pushing problem as a multi objective optimization problem using modified Multi-objective Particle Swarm Optimization. The method proposed here allows both turning and translation of the box, during shift to a desired goal position. We have employed local planning scheme to determine the magnitude of the forces applied by the two mobile robots perpendicularly at specific locations on the box to align and translate it in each distinct step of motion of the box, for minimization of both time and energy. Finally the results are compared with the results obtained by solving the same problem using Non-dominated Sorting Genetic Algorithm-II (NSGA-II). The proposed scheme is found to give better results compared to NSGA-II.
Extension of Max-Min Ant System with Exponential Pheromone Deposition Rule
Nov 02, 2008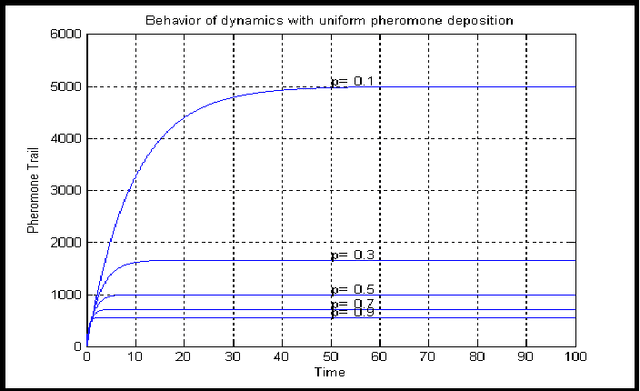
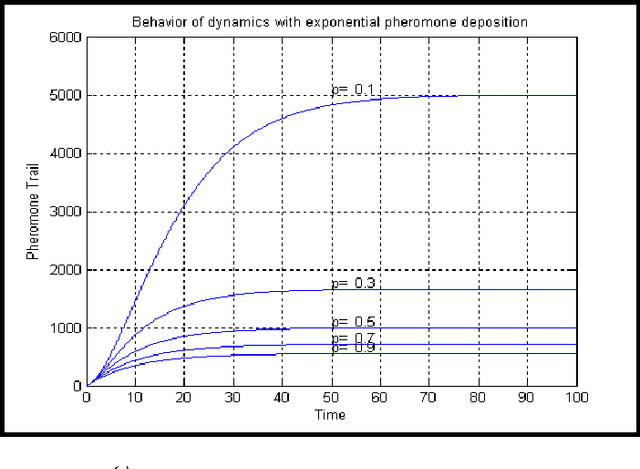
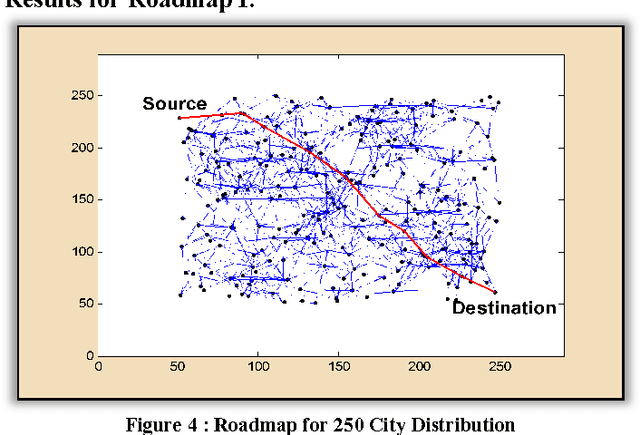
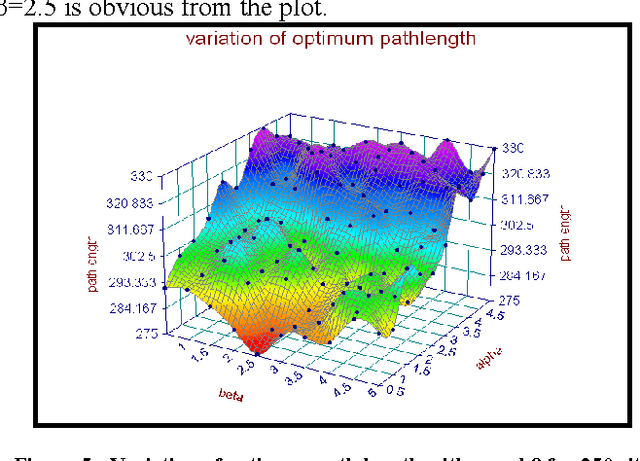
The paper presents an exponential pheromone deposition approach to improve the performance of classical Ant System algorithm which employs uniform deposition rule. A simplified analysis using differential equations is carried out to study the stability of basic ant system dynamics with both exponential and constant deposition rules. A roadmap of connected cities, where the shortest path between two specified cities are to be found out, is taken as a platform to compare Max-Min Ant System model (an improved and popular model of Ant System algorithm) with exponential and constant deposition rules. Extensive simulations are performed to find the best parameter settings for non-uniform deposition approach and experiments with these parameter settings revealed that the above approach outstripped the traditional one by a large extent in terms of both solution quality and convergence time.