 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoping with the variability in humans reward during simulated human-robot interactions through the coordination of multiple learning strategies
May 06, 2020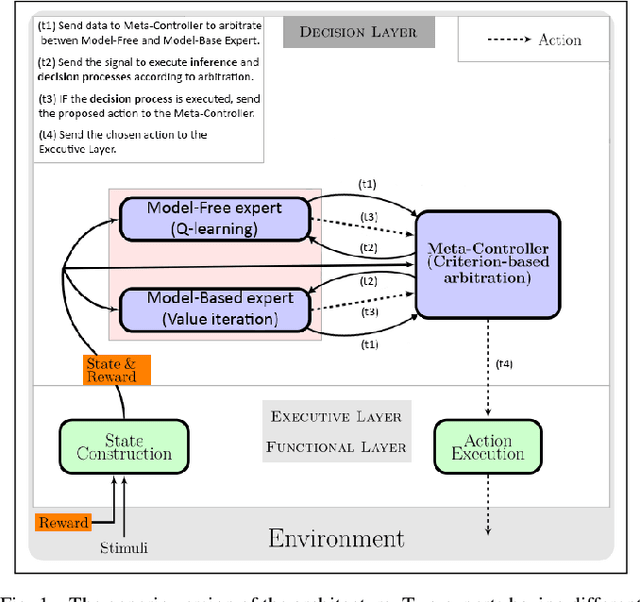
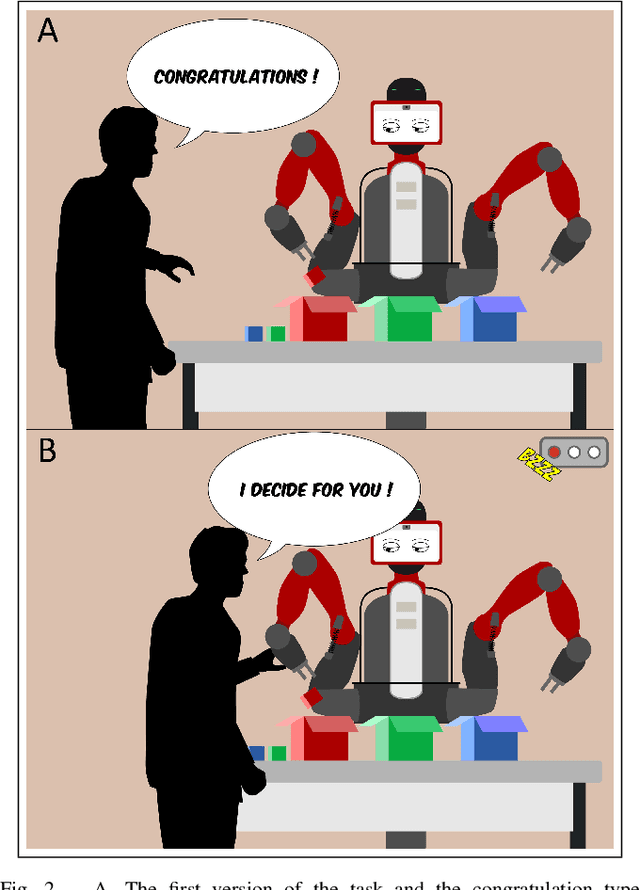
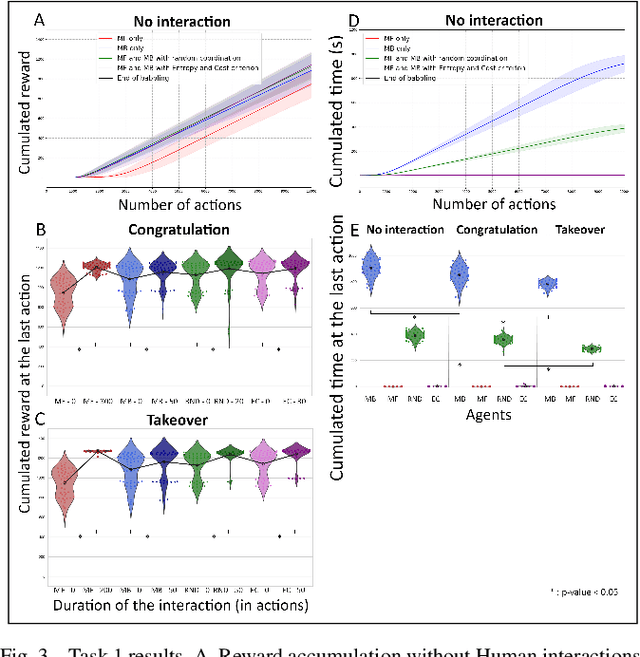
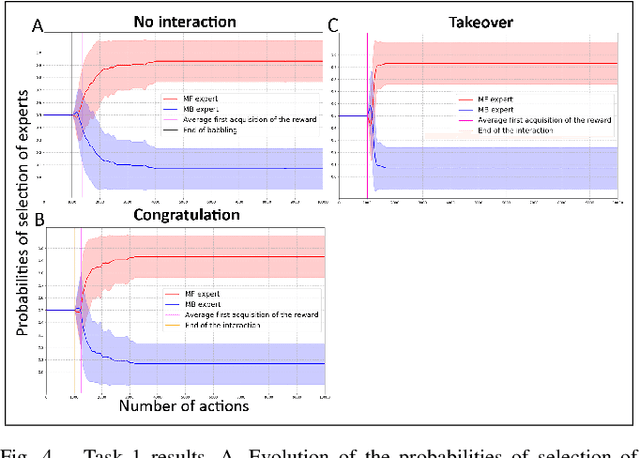
An important current challenge in Human-Robot Interaction (HRI) is to enable robots to learn on-the-fly from human feedback. However, humans show a great variability in the way they reward robots. We propose to address this issue by enabling the robot to combine different learning strategies, namely model-based (MB) and model-free (MF) reinforcement learning. We simulate two HRI scenarios: a simple task where the human congratulates the robot for putting the right cubes in the right boxes, and a more complicated version of this task where cubes have to be placed in a specific order. We show that our existing MB-MF coordination algorithm previously tested in robot navigation works well here without retuning parameters. It leads to the maximal performance while producing the same minimal computational cost as MF alone. Moreover, the algorithm gives a robust performance no matter the variability of the simulated human feedback, while each strategy alone is impacted by this variability. Overall, the results suggest a promising way to promote robot learning flexibility when facing variable human feedback.
How to reduce computation time while sparing performance during robot navigation? A neuro-inspired architecture for autonomous shifting between model-based and model-free learning
Apr 30, 2020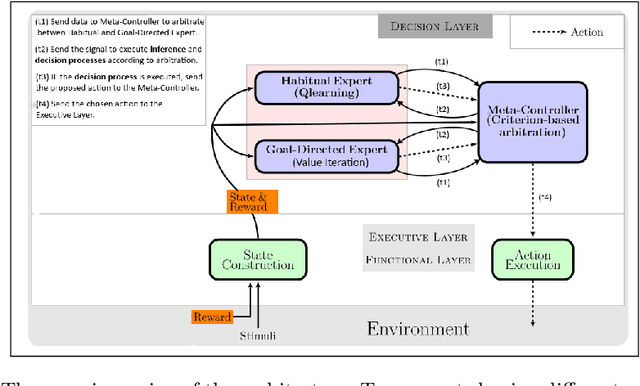
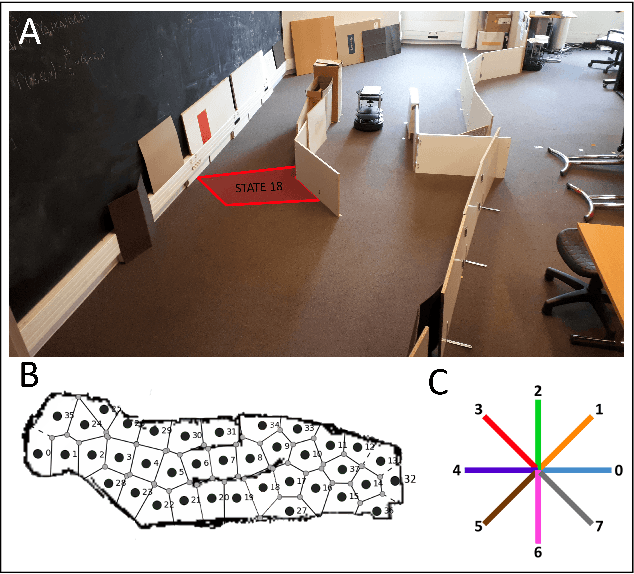
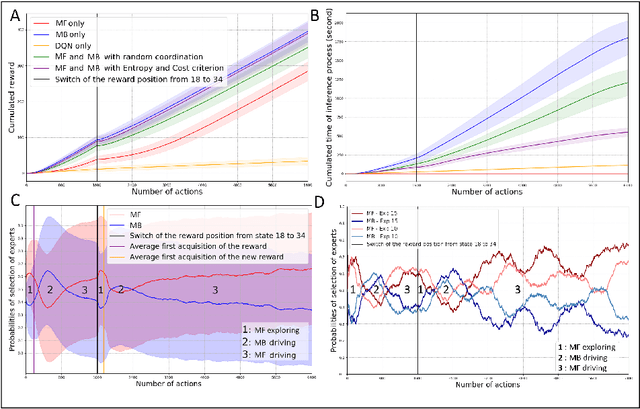
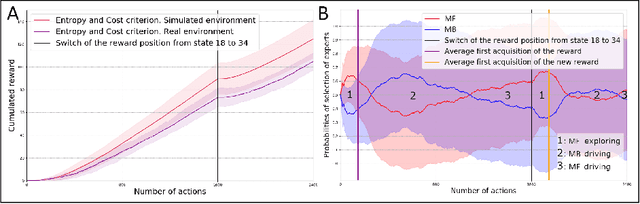
Taking inspiration from how the brain coordinates multiple learning systems is an appealing strategy to endow robots with more flexibility. One of the expected advantages would be for robots to autonomously switch to the least costly system when its performance is satisfying. However, to our knowledge no study on a real robot has yet shown that the measured computational cost is reduced while performance is maintained with such brain-inspired algorithms. We present navigation experiments involving paths of different lengths to the goal, dead-end, and non-stationarity (i.e., change in goal location and apparition of obstacles). We present a novel arbitration mechanism between learning systems that explicitly measures performance and cost. We find that the robot can adapt to environment changes by switching between learning systems so as to maintain a high performance. Moreover, when the task is stable, the robot also autonomously shifts to the least costly system, which leads to a drastic reduction in computation cost while keeping a high performance. Overall, these results illustrates the interest of using multiple learning systems.