 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-organized Polygon Formation Control based on Distributed Estimation
Aug 01, 2022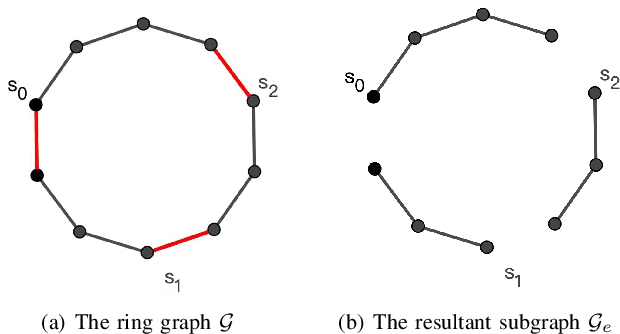
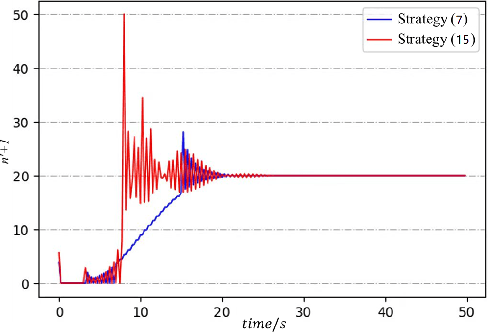
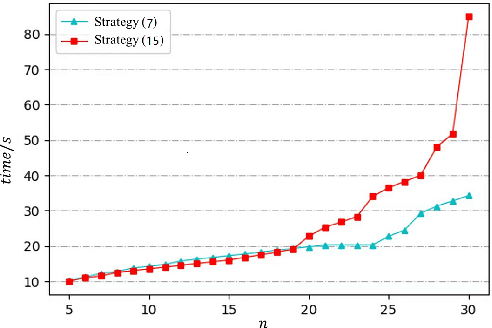
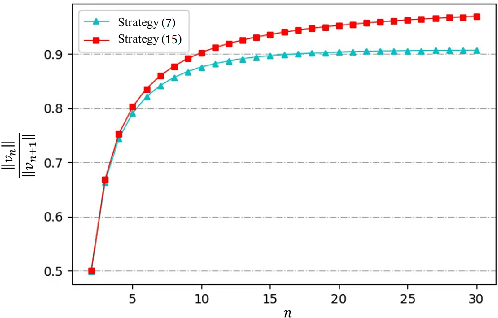
This paper studies the problem of controlling a multi-robot system to achieve a polygon formation in a self-organized manner. Different from the typical formation control strategies where robots are steered to satisfy the predefined control variables, such as pairwise distances, relative positions and bearings, the foremost idea of this paper is to achieve polygon formations by injecting control inputs randomly to a few robots (say, vertex robots) of the group, and the rest follow the simple principles of moving towards the midpoint of their two nearest neighbors in the ring graph without any external inputs. In our problem, a fleet of robots is initially distributed in the plane. The socalled vertex robots take the responsibility of determining the geometric shape of the entire formation and its overall size, while the others move so as to minimize the differences with two direct neighbors. In the first step, each vertex robot estimates the number of robots in its associated chain. Two types of control inputs that serve for the estimation are designed using the measurements from the latest and the last two time instants respectively. In the second step, the self-organized formation control law is proposed where only vertex robots receive external information. Comparisons between the two estimation strategies are carried out in terms of the convergence speed and robustness. The effectiveness of the whole control framework is further validated in both simulation and physical experiments.
Distributed Global Output-Feedback Control for a Class of Euler-Lagrange Systems
Jun 29, 2019



This published paper investigates the distributed tracking control problem for a class of Euler-Lagrange multi-agent systems when the agents can only measure the positions. In this case, the lack of the separation principle and the strong nonlinearity in unmeasurable states pose severe technical challenges to global output-feedback control design. To overcome these difficulties, a global nonsingular coordinate transformation matrix in the upper triangular form is firstly proposed such that the nonlinear dynamic model can be partially linearized with respect to the unmeasurable states. And, a new type of velocity observers is designed to estimate the unmeasurable velocities for each system. Then, based on the outputs of the velocity observers, we propose distributed control laws that enable the coordinated tracking control system to achieve uniform global exponential stability (UGES). Both theoretical analysis and numerical simulations are presented to validate the effectiveness of the proposed control scheme. Followed by the original paper, a typo and a mistake is corrected.
* The original published paper and its errata are presented