 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCervical Optical Coherence Tomography Image Classification Based on Contrastive Self-Supervised Texture Learning
Aug 11, 2021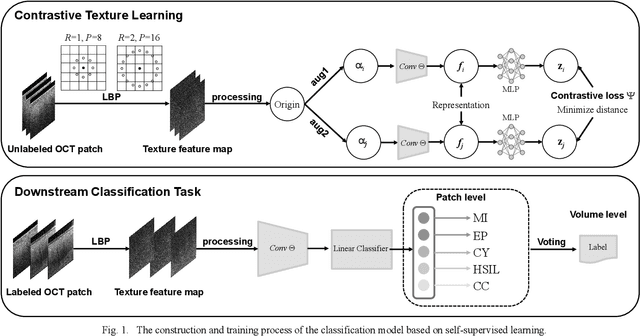
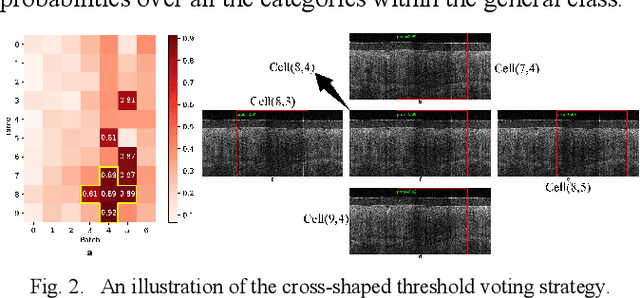
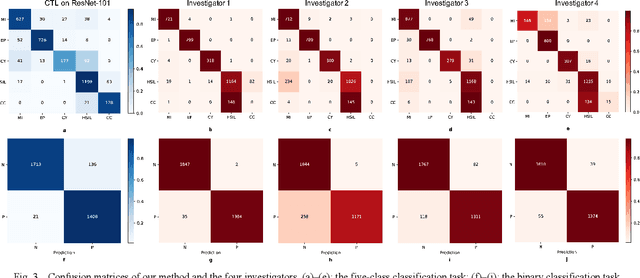
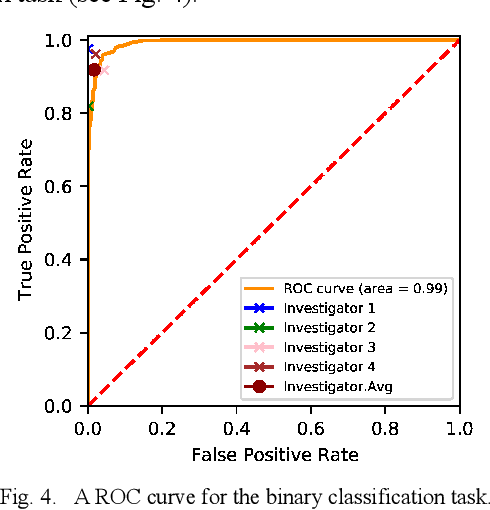
Background: Cervical cancer seriously affects the health of the female reproductive system. Optical coherence tomography (OCT) emerges as a non-invasive, high-resolution imaging technology for cervical disease detection. However, OCT image annotation is knowledge-intensive and time-consuming, which impedes the training process of deep-learning-based classification models. Objective: This study aims to develop a computer-aided diagnosis (CADx) approach to classifying in-vivo cervical OCT images based on self-supervised learning. Methods: Besides high-level semantic features extracted by a convolutional neural network (CNN), the proposed CADx approach leverages unlabeled cervical OCT images' texture features learned by contrastive texture learning. We conducted ten-fold cross-validation on the OCT image dataset from a multi-center clinical study on 733 patients from China. Results: In a binary classification task for detecting high-risk diseases, including high-grade squamous intraepithelial lesion (HSIL) and cervical cancer, our method achieved an area-under-the-curve (AUC) value of 0.9798 Plus or Minus 0.0157 with a sensitivity of 91.17 Plus or Minus 4.99% and a specificity of 93.96 Plus or Minus 4.72% for OCT image patches; also, it outperformed two out of four medical experts on the test set. Furthermore, our method achieved a 91.53% sensitivity and 97.37% specificity on an external validation dataset containing 287 3D OCT volumes from 118 Chinese patients in a new hospital using a cross-shaped threshold voting strategy. Conclusion: The proposed contrastive-learning-based CADx method outperformed the end-to-end CNN models and provided better interpretability based on texture features, which holds great potential to be used in the clinical protocol of "see-and-treat."
Motion Control on Bionic Eyes: A Comprehensive Review
Jan 06, 2019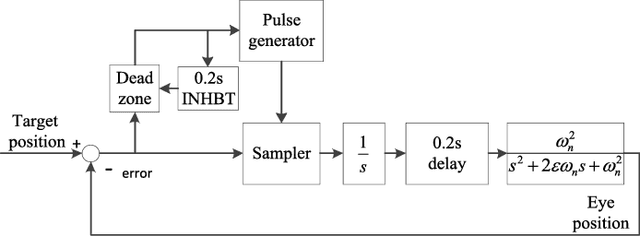
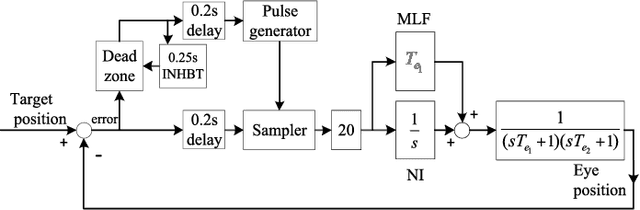
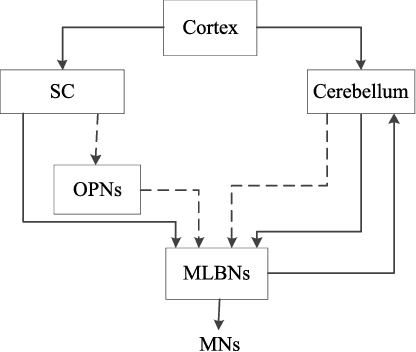
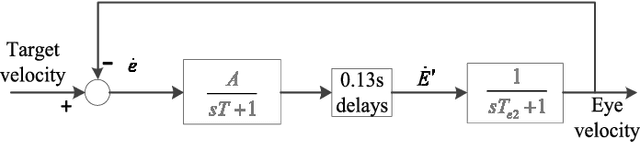
Biology can provide biomimetic components and new control principles for robotics. Developing a robot system equipped with bionic eyes is a difficult but exciting task. Researchers have been studying the control mechanisms of bionic eyes for many years and considerable models are available. In this paper, control model and its implementation on robots for bionic eyes are reviewed, which covers saccade, smooth pursuit, vergence, vestibule-ocular reflex (VOR), optokinetic reflex (OKR) and eye-head coordination. What is more, some problems and possible solutions in the field of bionic eyes are discussed and analyzed. This review paper can be used as a guide for researchers to identify potential research problems and solutions of the bionic eyes' motion control.