 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpiking Neural-Invariant Kalman Fusion for Accurate Localization Using Low-Cost IMUs
Jan 13, 2026Low-cost inertial measurement units (IMUs) are widely utilized in mobile robot localization due to their affordability and ease of integration. However, their complex, nonlinear, and time-varying noise characteristics often lead to significant degradation in localization accuracy when applied directly for dead reckoning. To overcome this limitation, we propose a novel brain-inspired state estimation framework that combines a spiking neural network (SNN) with an invariant extended Kalman filter (InEKF). The SNN is designed to extract motion-related features from long sequences of IMU data affected by substantial random noise and is trained via a surrogate gradient descent algorithm to enable dynamic adaptation of the covariance noise parameter within the InEKF. By fusing the SNN output with raw IMU measurements, the proposed method enhances the robustness and accuracy of pose estimation. Extensive experiments conducted on the KITTI dataset and real-world data collected using a mobile robot equipped with a low-cost IMU demonstrate that the proposed approach outperforms state-of-the-art methods in localization accuracy and exhibits strong robustness to sensor noise, highlighting its potential for real-world mobile robot applications.
Hierarchically Encapsulated Representation for Protocol Design in Self-Driving Labs
Apr 04, 2025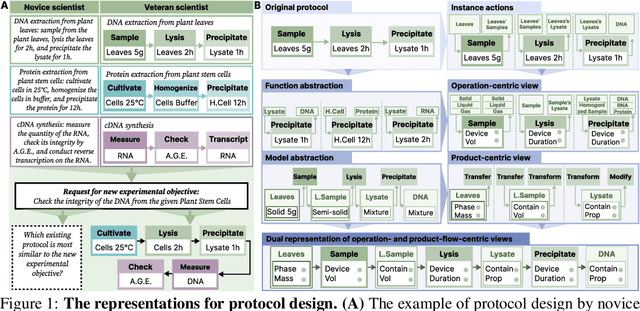
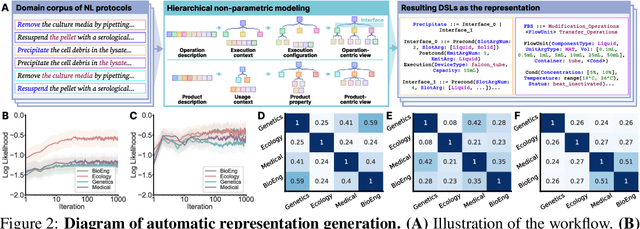
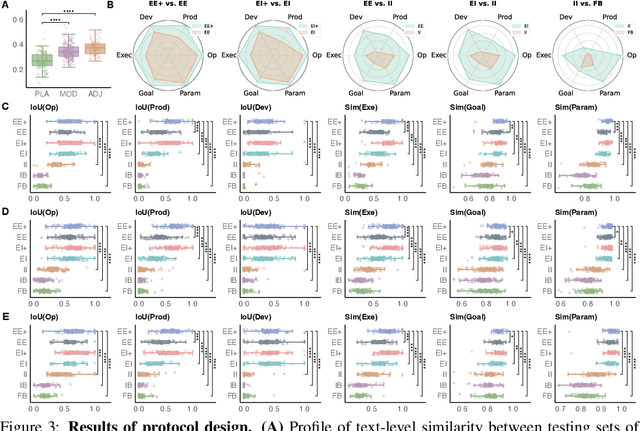
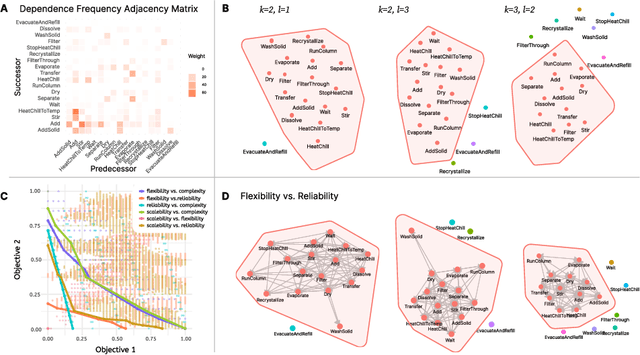
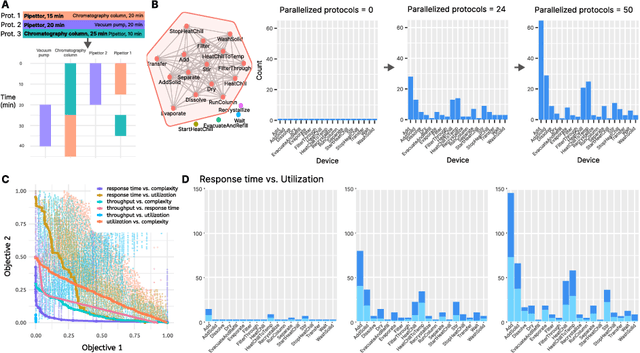
Self-driving laboratories have begun to replace human experimenters in performing single experimental skills or predetermined experimental protocols. However, as the pace of idea iteration in scientific research has been intensified by Artificial Intelligence, the demand for rapid design of new protocols for new discoveries become evident. Efforts to automate protocol design have been initiated, but the capabilities of knowledge-based machine designers, such as Large Language Models, have not been fully elicited, probably for the absence of a systematic representation of experimental knowledge, as opposed to isolated, flatten pieces of information. To tackle this issue, we propose a multi-faceted, multi-scale representation, where instance actions, generalized operations, and product flow models are hierarchically encapsulated using Domain-Specific Languages. We further develop a data-driven algorithm based on non-parametric modeling that autonomously customizes these representations for specific domains. The proposed representation is equipped with various machine designers to manage protocol design tasks, including planning, modification, and adjustment. The results demonstrate that the proposed method could effectively complement Large Language Models in the protocol design process, serving as an auxiliary module in the realm of machine-assisted scientific exploration.
Expert-level protocol translation for self-driving labs
Nov 01, 2024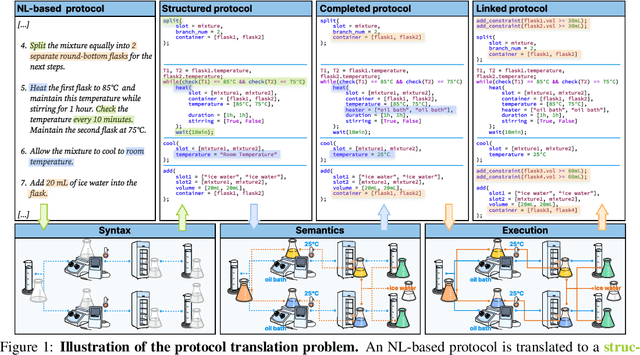
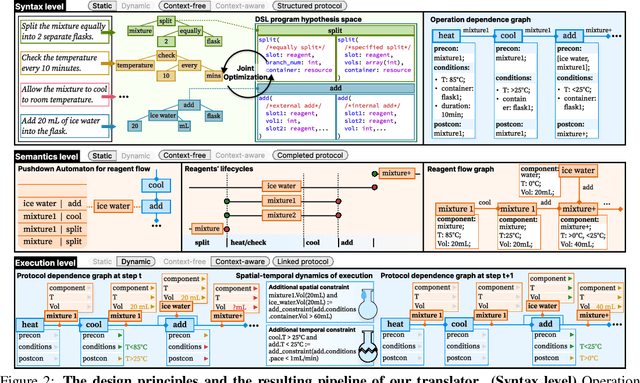
Recent development in Artificial Intelligence (AI) models has propelled their application in scientific discovery, but the validation and exploration of these discoveries require subsequent empirical experimentation. The concept of self-driving laboratories promises to automate and thus boost the experimental process following AI-driven discoveries. However, the transition of experimental protocols, originally crafted for human comprehension, into formats interpretable by machines presents significant challenges, which, within the context of specific expert domain, encompass the necessity for structured as opposed to natural language, the imperative for explicit rather than tacit knowledge, and the preservation of causality and consistency throughout protocol steps. Presently, the task of protocol translation predominantly requires the manual and labor-intensive involvement of domain experts and information technology specialists, rendering the process time-intensive. To address these issues, we propose a framework that automates the protocol translation process through a three-stage workflow, which incrementally constructs Protocol Dependence Graphs (PDGs) that approach structured on the syntax level, completed on the semantics level, and linked on the execution level. Quantitative and qualitative evaluations have demonstrated its performance at par with that of human experts, underscoring its potential to significantly expedite and democratize the process of scientific discovery by elevating the automation capabilities within self-driving laboratories.
Abstract Hardware Grounding towards the Automated Design of Automation Systems
Oct 08, 2024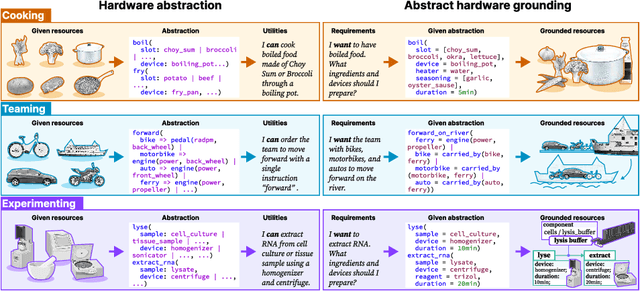
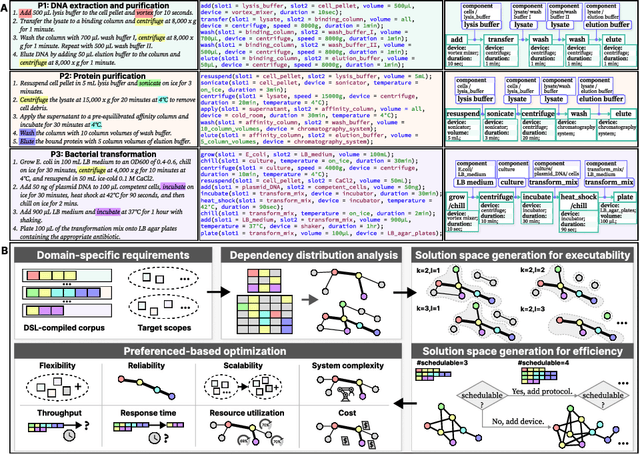
Crafting automation systems tailored for specific domains requires aligning the space of human experts' semantics with the space of robot executable actions, and scheduling the required resources and system layout accordingly. Regrettably, there are three major gaps, fine-grained domain-specific knowledge injection, heterogeneity between human knowledge and robot instructions, and diversity of users' preferences, resulting automation system design a case-by-case and labour-intensive effort, thus hindering the democratization of automation. We refer to this challenging alignment as the abstract hardware grounding problem, where we firstly regard the procedural operations in humans' semantics space as the abstraction of hardware requirements, then we ground such abstractions to instantiated hardware devices, subject to constraints and preferences in the real world -- optimizing this problem is essentially standardizing and automating the design of automation systems. On this basis, we develop an automated design framework in a hybrid data-driven and principle-derived fashion. Results on designing self-driving laboratories for enhancing experiment-driven scientific discovery suggest our framework's potential to produce compact systems that fully satisfy domain-specific and user-customized requirements with no redundancy.