 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLegal-DC: Benchmarking Retrieval-Augmented Generation for Legal Documents
Mar 12, 2026Retrieval-Augmented Generation (RAG) has emerged as a promising technology for legal document consultation, yet its application in Chinese legal scenarios faces two key limitations: existing benchmarks lack specialized support for joint retriever-generator evaluation, and mainstream RAG systems often fail to accommodate the structured nature of legal provisions. To address these gaps, this study advances two core contributions: First, we constructed the Legal-DC benchmark dataset, comprising 480 legal documents (covering areas such as market regulation and contract management) and 2,475 refined question-answer pairs, each annotated with clause-level references, filling the gap for specialized evaluation resources in Chinese legal RAG. Second, we propose the LegRAG framework, which integrates legal adaptive indexing (clause-boundary segmentation) with a dual-path self-reflection mechanism to ensure clause integrity while enhancing answer accuracy. Third, we introduce automated evaluation methods for large language models to meet the high-reliability demands of legal retrieval scenarios. LegRAG outperforms existing state-of-the-art methods by 1.3% to 5.6% across key evaluation metrics. This research provides a specialized benchmark, practical framework, and empirical insights to advance the development of Chinese legal RAG systems. Our code and data are available at https://github.com/legal-dc/Legal-DC.
Semantic tracking: Single-target tracking with inter-supervised convolutional networks
Nov 19, 2016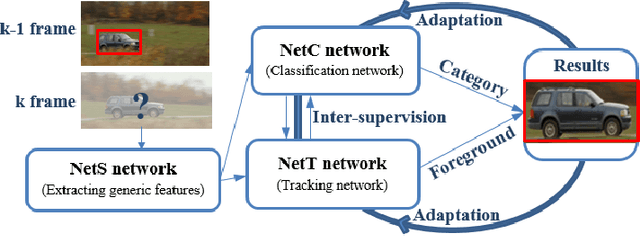

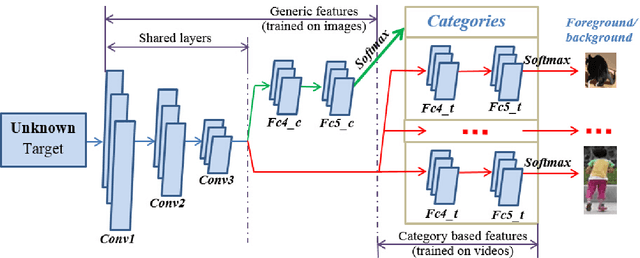

This article presents a semantic tracker which simultaneously tracks a single target and recognises its category. In general, it is hard to design a tracking model suitable for all object categories, e.g., a rigid tracker for a car is not suitable for a deformable gymnast. Category-based trackers usually achieve superior tracking performance for the objects of that specific category, but have difficulties being generalised. Therefore, we propose a novel unified robust tracking framework which explicitly encodes both generic features and category-based features. The tracker consists of a shared convolutional network (NetS), which feeds into two parallel networks, NetC for classification and NetT for tracking. NetS is pre-trained on ImageNet to serve as a generic feature extractor across the different object categories for NetC and NetT. NetC utilises those features within fully connected layers to classify the object category. NetT has multiple branches, corresponding to multiple categories, to distinguish the tracked object from the background. Since each branch in NetT is trained by the videos of a specific category or groups of similar categories, NetT encodes category-based features for tracking. During online tracking, NetC and NetT jointly determine the target regions with the right category and foreground labels for target estimation. To improve the robustness and precision, NetC and NetT inter-supervise each other and trigger network adaptation when their outputs are ambiguous for the same image regions (i.e., when the category label contradicts the foreground/background classification). We have compared the performance of our tracker to other state-of-the-art trackers on a large-scale tracking benchmark (100 sequences)---the obtained results demonstrate the effectiveness of our proposed tracker as it outperformed other 38 state-of-the-art tracking algorithms.