 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSLACK: Attacking LiDAR-based SLAM with Adversarial Point Injections
Apr 03, 2025The widespread adoption of learning-based methods for the LiDAR makes autonomous vehicles vulnerable to adversarial attacks through adversarial \textit{point injections (PiJ)}. It poses serious security challenges for navigation and map generation. Despite its critical nature, no major work exists that studies learning-based attacks on LiDAR-based SLAM. Our work proposes SLACK, an end-to-end deep generative adversarial model to attack LiDAR scans with several point injections without deteriorating LiDAR quality. To facilitate SLACK, we design a novel yet simple autoencoder that augments contrastive learning with segmentation-based attention for precise reconstructions. SLACK demonstrates superior performance on the task of \textit{point injections (PiJ)} compared to the best baselines on KITTI and CARLA-64 dataset while maintaining accurate scan quality. We qualitatively and quantitatively demonstrate PiJ attacks using a fraction of LiDAR points. It severely degrades navigation and map quality without deteriorating the LiDAR scan quality.
GLiDR: Topologically Regularized Graph Generative Network for Sparse LiDAR Point Clouds
Nov 29, 2023Sparse LiDAR point clouds cause severe loss of detail of static structures and reduce the density of static points available for navigation. Reduced density can be detrimental to navigation under several scenarios. We observe that despite high sparsity, in most cases, the global topology of LiDAR outlining the static structures can be inferred. We utilize this property to obtain a backbone skeleton of a static LiDAR scan in the form of a single connected component that is a proxy to its global topology. We utilize the backbone to augment new points along static structures to overcome sparsity. Newly introduced points could correspond to existing static structures or to static points that were earlier obstructed by dynamic objects. To the best of our knowledge, we are the first to use this strategy for sparse LiDAR point clouds. Existing solutions close to our approach fail to identify and preserve the global static LiDAR topology and generate sub-optimal points. We propose GLiDR, a Graph Generative network that is topologically regularized using 0-dimensional Persistent Homology (PH) constraints. This enables GLiDR to introduce newer static points along a topologically consistent global static LiDAR backbone. GLiDR generates precise static points using 32x sparser dynamic scans and performs better than the baselines across three datasets. The newly introduced static points allow GLiDR to outperform LiDAR-based navigation using SLAM in several settings. GLiDR generates a valuable byproduct - an accurate binary segmentation mask of static and dynamic objects that is helpful for navigation planning and safety in constrained environments.
Neuro-Endo-Trainer-Online Assessment System (NET-OAS) for Neuro-Endoscopic Skills Training
Jul 16, 2020
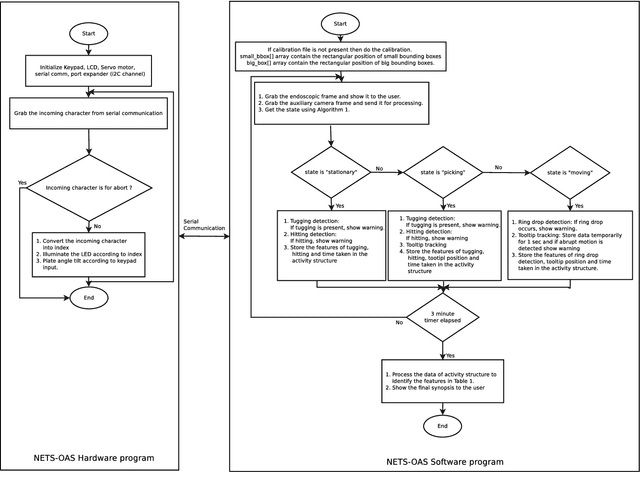
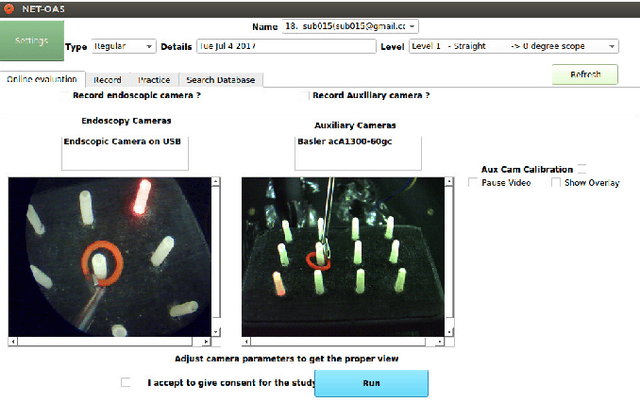
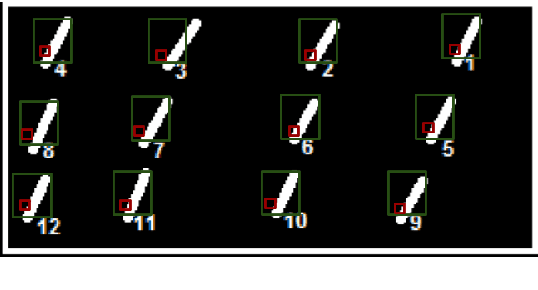
Neuro-endoscopy is a challenging minimally invasive neurosurgery that requires surgical skills to be acquired using training methods different from the existing apprenticeship model. There are various training systems developed for imparting fundamental technical skills in laparoscopy where as limited systems for neuro-endoscopy. Neuro-Endo-Trainer was a box-trainer developed for endo-nasal transsphenoidal surgical skills training with video based offline evaluation system. The objective of the current study was to develop a modified version (Neuro-Endo-Trainer-Online Assessment System (NET-OAS)) by providing a stand-alone system with online evaluation and real-time feedback. The validation study on a group of 15 novice participants shows the improvement in the technical skills for handling the neuro-endoscope and the tool while performing pick and place activity.
* Published at Federated Conference on Computer Science and Information Systems - FedCSIS 2017