 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSucceeding at Scale: Automated Multi-Retriever Fusion and Query-Side Adaptation for Multi-Tenant Search
Jan 08, 2026Large-scale multi-tenant retrieval systems amass vast user query logs yet critically lack the curated relevance labels required for effective domain adaptation. This "dark data" problem is exacerbated by the operational cost of model updates: jointly fine-tuning query and document encoders requires re-indexing the entire corpus, which is prohibitive in multi-tenant environments with thousands of isolated indices. To address these dual challenges, we introduce \textbf{DevRev Search}, a passage retrieval benchmark for technical customer support constructed through a fully automatic pipeline. We employ a \textbf{fusion-based candidate generation} strategy, pooling results from diverse sparse and dense retrievers, and utilize an LLM-as-a-Judge to perform rigorous \textbf{consistency filtering} and relevance assignment. We further propose a practical \textbf{Index-Preserving Adaptation} strategy: by fine-tuning only the query encoder via Low-Rank Adaptation (LoRA), we achieve competitive performance improvements while keeping the document index frozen. Our experiments on DevRev Search and SciFact demonstrate that targeting specific transformer layers in the query encoder yields optimal quality-efficiency trade-offs, offering a scalable path for personalized enterprise search.
Learning Embeddings that Capture Spatial Semantics for Indoor Navigation
Jul 31, 2021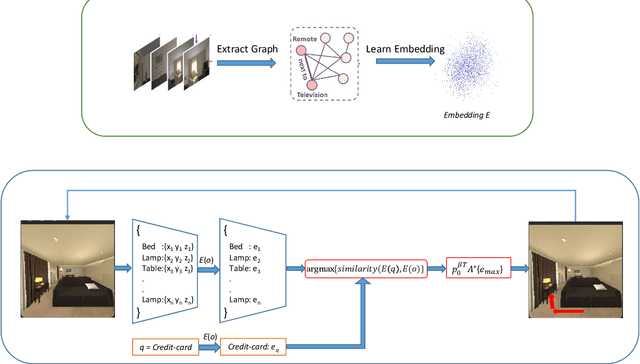
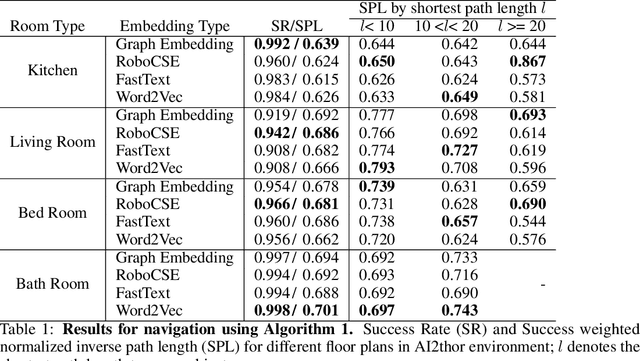
Incorporating domain-specific priors in search and navigation tasks has shown promising results in improving generalization and sample complexity over end-to-end trained policies. In this work, we study how object embeddings that capture spatial semantic priors can guide search and navigation tasks in a structured environment. We know that humans can search for an object like a book, or a plate in an unseen house, based on the spatial semantics of bigger objects detected. For example, a book is likely to be on a bookshelf or a table, whereas a plate is likely to be in a cupboard or dishwasher. We propose a method to incorporate such spatial semantic awareness in robots by leveraging pre-trained language models and multi-relational knowledge bases as object embeddings. We demonstrate using these object embeddings to search a query object in an unseen indoor environment. We measure the performance of these embeddings in an indoor simulator (AI2Thor). We further evaluate different pre-trained embedding onSuccess Rate(SR) and success weighted by Path Length(SPL).