 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImagined Potential Games: A Framework for Simulating, Learning and Evaluating Interactive Behaviors
Nov 06, 2024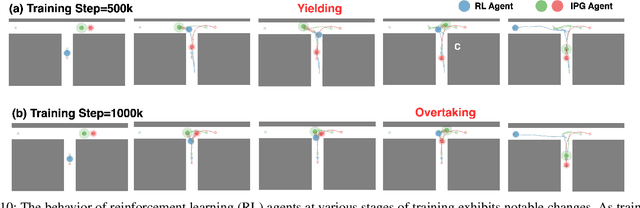

Interacting with human agents in complex scenarios presents a significant challenge for robotic navigation, particularly in environments that necessitate both collision avoidance and collaborative interaction, such as indoor spaces. Unlike static or predictably moving obstacles, human behavior is inherently complex and unpredictable, stemming from dynamic interactions with other agents. Existing simulation tools frequently fail to adequately model such reactive and collaborative behaviors, impeding the development and evaluation of robust social navigation strategies. This paper introduces a novel framework utilizing distributed potential games to simulate human-like interactions in highly interactive scenarios. Within this framework, each agent imagines a virtual cooperative game with others based on its estimation. We demonstrate this formulation can facilitate the generation of diverse and realistic interaction patterns in a configurable manner across various scenarios. Additionally, we have developed a gym-like environment leveraging our interactive agent model to facilitate the learning and evaluation of interactive navigation algorithms.
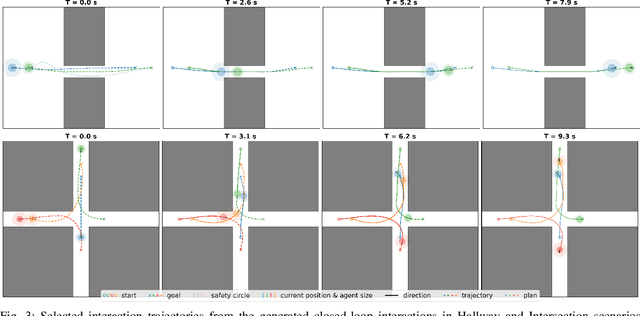
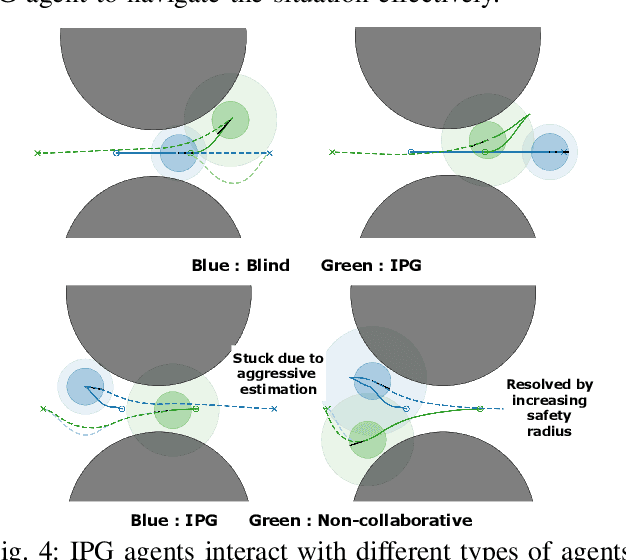
Distributed Multi-agent Interaction Generation with Imagined Potential Games
Oct 02, 2023Interactive behavior modeling of multiple agents is an essential challenge in simulation, especially in scenarios when agents need to avoid collisions and cooperate at the same time. Humans can interact with others without explicit communication and navigate in scenarios when cooperation is required. In this work, we aim to model human interactions in this realistic setting, where each agent acts based on its observation and does not communicate with others. We propose a framework based on distributed potential games, where each agent imagines a cooperative game with other agents and solves the game using its estimation of their behavior. We utilize iLQR to solve the games and closed-loop simulate the interactions. We demonstrate the benefits of utilizing distributed imagined games in our framework through various simulation experiments. We show the high success rate, the increased navigation efficiency, and the ability to generate rich and realistic interactions with interpretable parameters. Illustrative examples are available at https://sites.google.com/berkeley.edu/distributed-interaction.