 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Global Clustering for Hyperspectral Image Segmentation: Concepts, Applications, and Open Challenges
Dec 30, 2025Hyperspectral imaging (HSI) analysis faces computational bottlenecks due to massive data volumes that exceed available memory. While foundation models pre-trained on large remote sensing datasets show promise, their learned representations often fail to transfer to domain-specific applications like close-range agricultural monitoring where spectral signatures, spatial scales, and semantic targets differ fundamentally. This report presents Deep Global Clustering (DGC), a conceptual framework for memory-efficient HSI segmentation that learns global clustering structure from local patch observations without pre-training. DGC operates on small patches with overlapping regions to enforce consistency, enabling training in under 30 minutes on consumer hardware while maintaining constant memory usage. On a leaf disease dataset, DGC achieves background-tissue separation (mean IoU 0.925) and demonstrates unsupervised disease detection through navigable semantic granularity. However, the framework suffers from optimization instability rooted in multi-objective loss balancing: meaningful representations emerge rapidly but degrade due to cluster over-merging in feature space. We position this work as intellectual scaffolding - the design philosophy has merit, but stable implementation requires principled approaches to dynamic loss balancing. Code and data are available at https://github.com/b05611038/HSI_global_clustering.
Team NCTU: Toward AI-Driving for Autonomous Surface Vehicles -- From Duckietown to RobotX
Oct 31, 2019

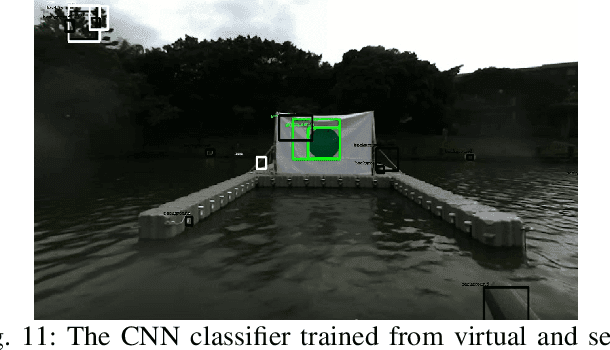

Robotic software and hardware systems of autonomous surface vehicles have been developed in transportation, military, and ocean researches for decades. Previous efforts in RobotX Challenges 2014 and 2016 facilitates the developments for important tasks such as obstacle avoidance and docking. Team NCTU is motivated by the AI Driving Olympics (AI-DO) developed by the Duckietown community, and adopts the principles to RobotX challenge. With the containerization (Docker) and uniformed AI agent (with observations and actions), we could better 1) integrate solutions developed in different middlewares (ROS and MOOS), 2) develop essential functionalities of from simulation (Gazebo) to real robots (either miniaturized or full-sized WAM-V), and 3) compare different approaches either from classic model-based or learning-based. Finally, we setup an outdoor on-surface platform with localization services for evaluation. Some of the preliminary results will be presented for the Team NCTU participations of the RobotX competition in Hawaii in 2018.
Duckiefloat: a Collision-Tolerant Resource-Constrained Blimp for Long-Term Autonomy in Subterranean Environments
Oct 31, 2019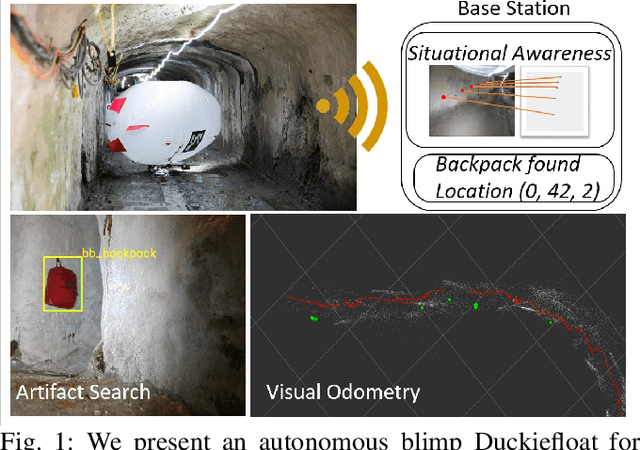
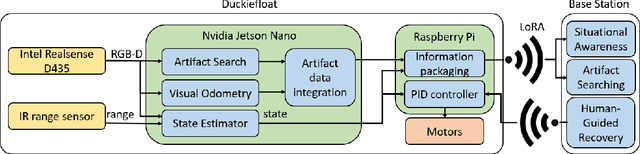
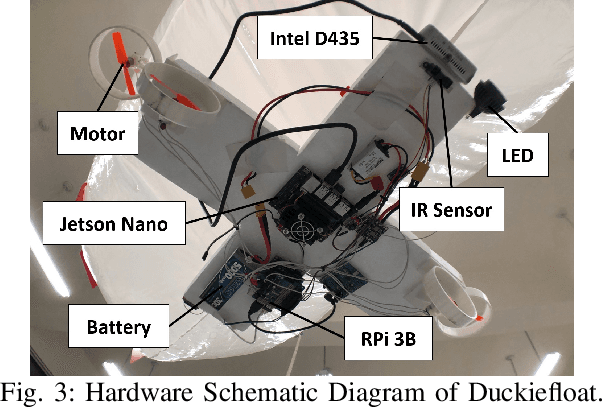

There are several challenges for search and rescue robots: mobility, perception, autonomy, and communication. Inspired by the DARPA Subterranean (SubT) Challenge, we propose an autonomous blimp robot, which has the advantages of low power consumption and collision-tolerance compared to other aerial vehicles like drones. This is important for search and rescue tasks that usually last for one or more hours. However, the underground constrained passages limit the size of blimp envelope and its payload, making the proposed system resource-constrained. Therefore, a careful design consideration is needed to build a blimp system with on-board artifact search and SLAM. In order to reach long-term operation, a failure-aware algorithm with minimal communication to human supervisor to have situational awareness and send control signals to the blimp when needed.