 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistribution Discrepancy and Feature Heterogeneity for Active 3D Object Detection
Sep 11, 2024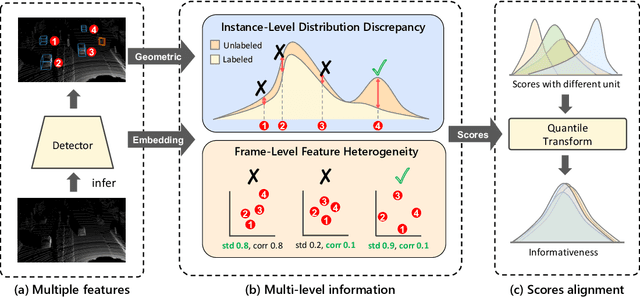

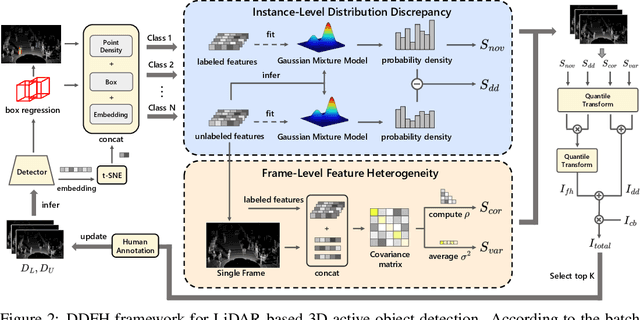
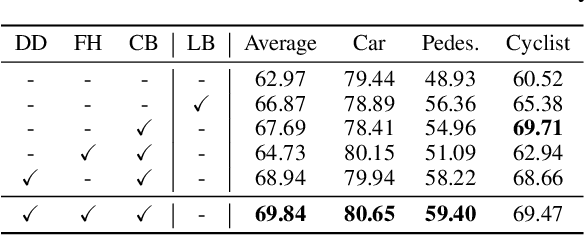
LiDAR-based 3D object detection is a critical technology for the development of autonomous driving and robotics. However, the high cost of data annotation limits its advancement. We propose a novel and effective active learning (AL) method called Distribution Discrepancy and Feature Heterogeneity (DDFH), which simultaneously considers geometric features and model embeddings, assessing information from both the instance-level and frame-level perspectives. Distribution Discrepancy evaluates the difference and novelty of instances within the unlabeled and labeled distributions, enabling the model to learn efficiently with limited data. Feature Heterogeneity ensures the heterogeneity of intra-frame instance features, maintaining feature diversity while avoiding redundant or similar instances, thus minimizing annotation costs. Finally, multiple indicators are efficiently aggregated using Quantile Transform, providing a unified measure of informativeness. Extensive experiments demonstrate that DDFH outperforms the current state-of-the-art (SOTA) methods on the KITTI and Waymo datasets, effectively reducing the bounding box annotation cost by 56.3% and showing robustness when working with both one-stage and two-stage models.