 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCT-ICP: Real-time Elastic LiDAR Odometry with Loop Closure
Sep 27, 2021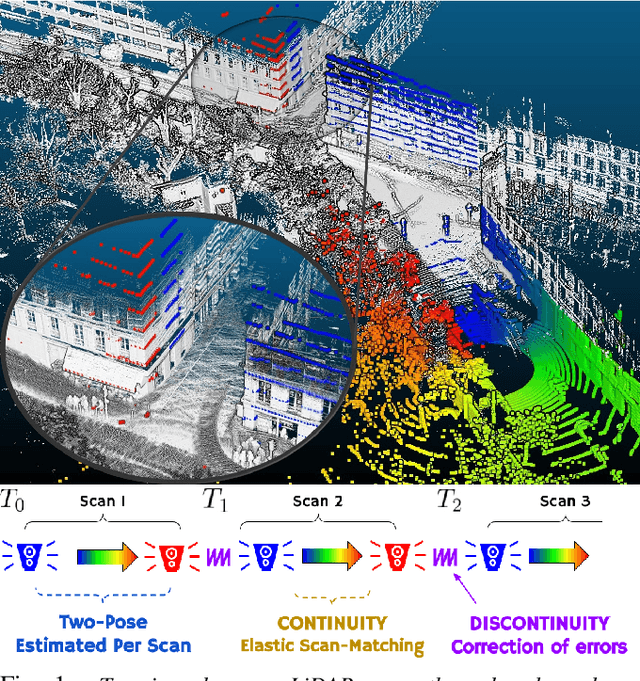
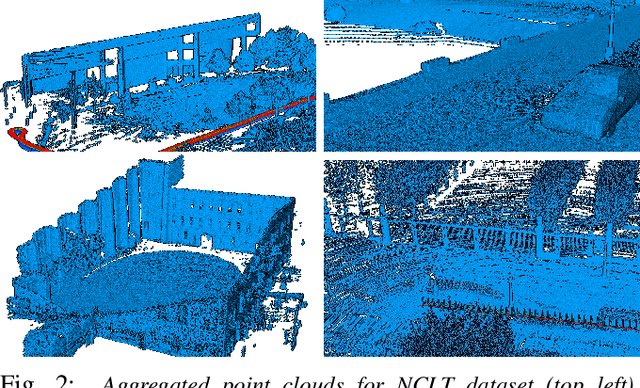

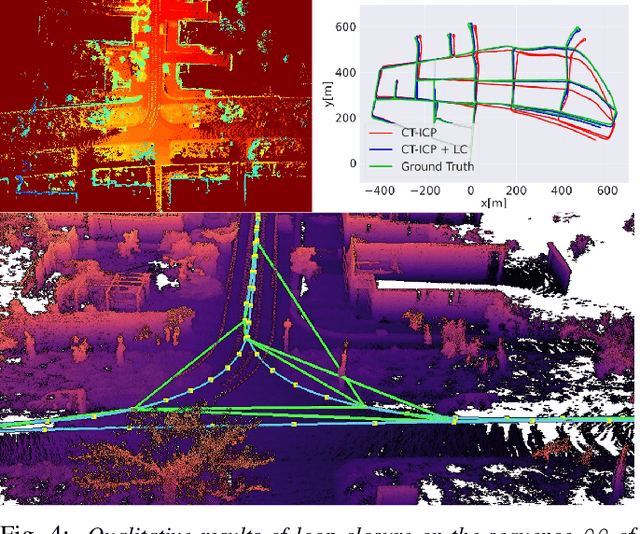
Multi-beam LiDAR sensors are increasingly used in robotics, particularly for autonomous cars for localization and perception tasks. However, perception is closely linked to the localization task and the robot's ability to build a fine map of its environment. For this, we propose a new real-time LiDAR odometry method called CT-ICP, as well as a complete SLAM with loop closure. The principle of CT-ICP is to use an elastic formulation of the trajectory, with a continuity of poses intra-scan and discontinuity between scans, to be more robust to high frequencies in the movements of the sensor. The registration is based on scan-to-map with a dense point cloud as map structured in sparse voxels to operate in real time. At the same time, a fast method of loop closure detection using elevation images and an optimization of poses by graph allows to obtain a complete SLAM purely on LiDAR. To show the robustness of the method, we tested it on seven datasets: KITTI, KITTI-raw, KITTI-360, KITTI-CARLA, ParisLuco, Newer College, and NCLT in driving and high-frequency motion scenarios. The CT-ICP odometry is implemented in C++ and available online. The loop detection and pose graph optimization is in the framework pyLiDAR-SLAM in Python and also available online. CT-ICP is currently first, among those giving access to a public code, on the KITTI odometry leaderboard, with an average Relative Translation Error (RTE) of 0.59% and an average time per scan of 60ms on a CPU with a single thread.
What s in My LiDAR Odometry Toolbox?
Mar 17, 2021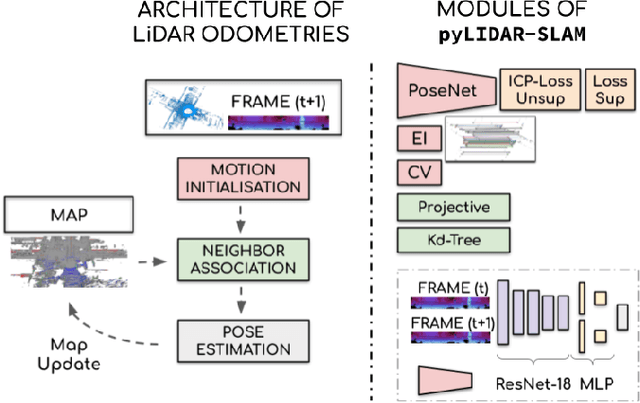
With the democratization of 3D LiDAR sensors, precise LiDAR odometries and SLAM are in high demand. New methods regularly appear, proposing solutions ranging from small variations in classical algorithms to radically new paradigms based on deep learning. Yet it is often difficult to compare these methods, notably due to the few datasets on which the methods can be evaluated and compared. Furthermore, their weaknesses are rarely examined, often letting the user discover the hard way whether a method would be appropriate for a use case. In this paper, we review and organize the main 3D LiDAR odometries into distinct categories. We implemented several approaches (geometric based, deep learning based, and hybrid methods) to conduct an in-depth analysis of their strengths and weaknesses on multiple datasets, guiding the reader through the different LiDAR odometries available. Implementation of the methods has been made publicly available at https://gitlab.kitware.com/keu-computervision/pylidar-slam.
Hiding in the Crowd: A Massively Distributed Algorithm for Private Averaging with Malicious Adversaries
Mar 27, 2018
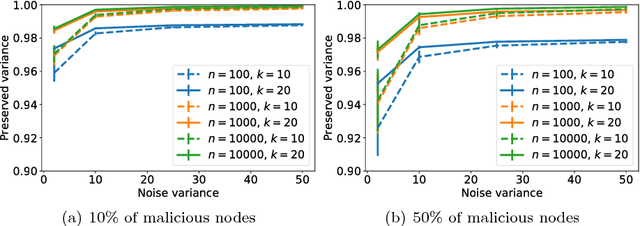
The amount of personal data collected in our everyday interactions with connected devices offers great opportunities for innovative services fueled by machine learning, as well as raises serious concerns for the privacy of individuals. In this paper, we propose a massively distributed protocol for a large set of users to privately compute averages over their joint data, which can then be used to learn predictive models. Our protocol can find a solution of arbitrary accuracy, does not rely on a third party and preserves the privacy of users throughout the execution in both the honest-but-curious and malicious adversary models. Specifically, we prove that the information observed by the adversary (the set of maliciours users) does not significantly reduce the uncertainty in its prediction of private values compared to its prior belief. The level of privacy protection depends on a quantity related to the Laplacian matrix of the network graph and generally improves with the size of the graph. Furthermore, we design a verification procedure which offers protection against malicious users joining the service with the goal of manipulating the outcome of the algorithm.