 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Object Tracking and Masking for Visual SLAM
Jul 31, 2020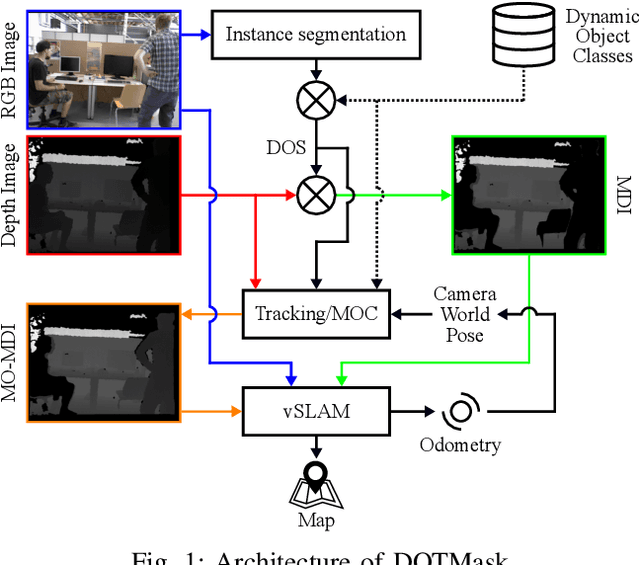
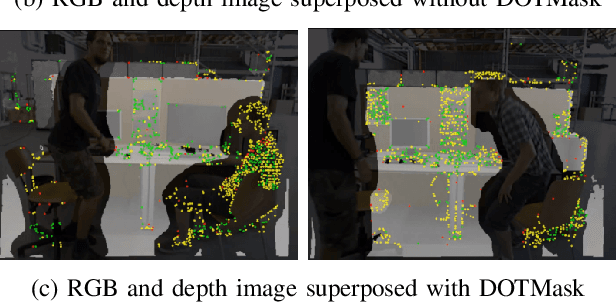
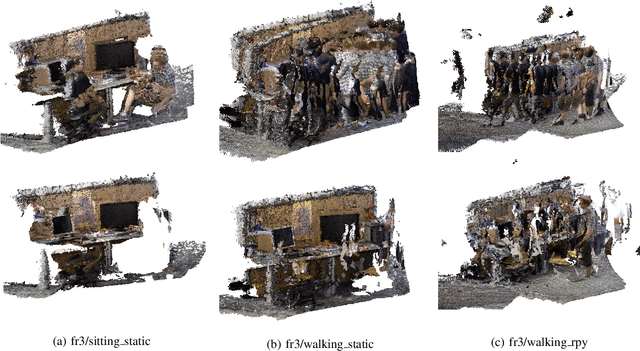
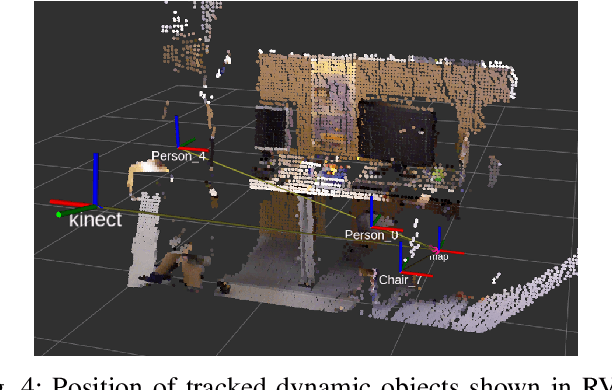
In dynamic environments, performance of visual SLAM techniques can be impaired by visual features taken from moving objects. One solution is to identify those objects so that their visual features can be removed for localization and mapping. This paper presents a simple and fast pipeline that uses deep neural networks, extended Kalman filters and visual SLAM to improve both localization and mapping in dynamic environments (around 14 fps on a GTX 1080). Results on the dynamic sequences from the TUM dataset using RTAB-Map as visual SLAM suggest that the approach achieves similar localization performance compared to other state-of-the-art methods, while also providing the position of the tracked dynamic objects, a 3D map free of those dynamic objects, better loop closure detection with the whole pipeline able to run on a robot moving at moderate speed.