 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Models of Spherical Parallel Robots for Model-Based Control Schemes
Oct 01, 2021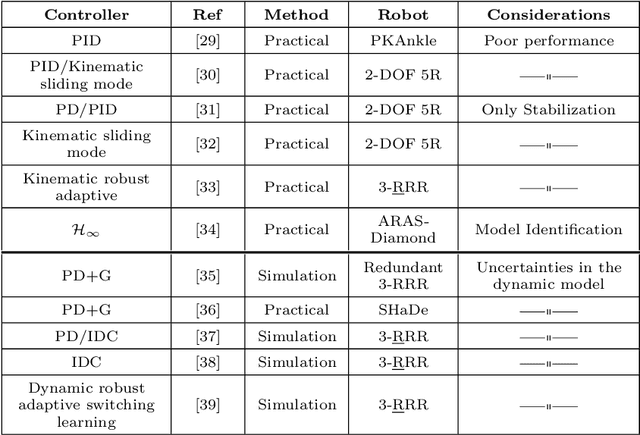
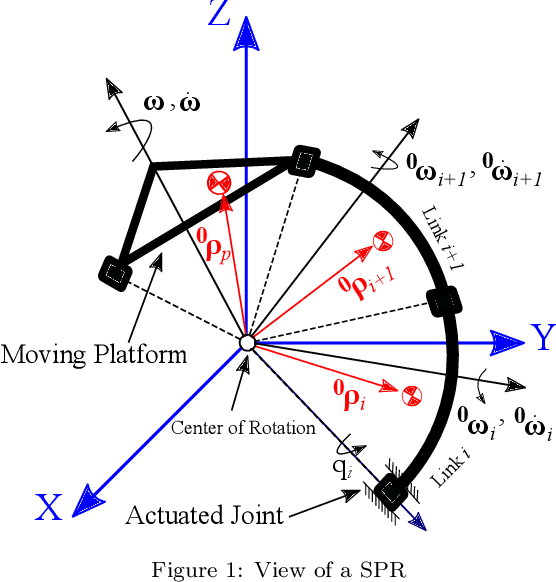
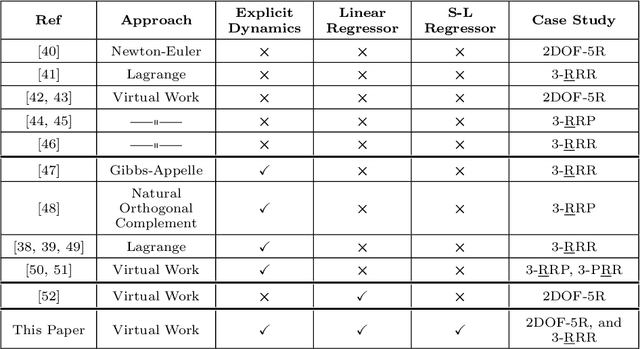
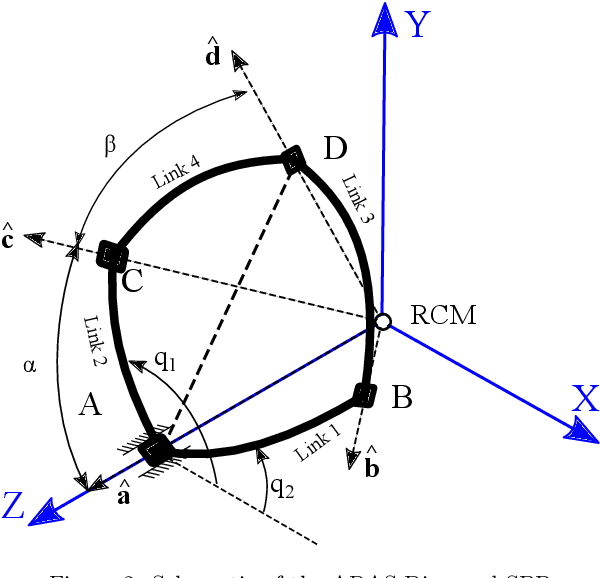
In this paper, derivation of different forms of dynamic formulation of spherical parallel robots (SPRs) is investigated. These formulations include the explicit dynamic forms, linear regressor, and Slotine-Li (SL) regressor, which are required for the design and implementation of the vast majority of model-based controllers and dynamic parameters identification schemes. To this end, the implicit dynamic of SPRs is first formulated using the principle of virtual work in task-space, and then by using an extension, their explicit dynamic formulation is derived. The dynamic equation is then analytically reformulated into linear and S-L regression form with respect to the inertial parameters, and by using the Gauss-Jordan procedure, it is reduced to a unique and closed-form structure. Finally, to illustrate the effectiveness of the proposed method, two different SPRs, namely, the ARAS-Diamond, and the 3-RRR, are examined as the case studies. The obtained results are verified by using the MSC-ADAMS software, and are shared to interested audience for public access.
A Cable-Driven Parallel Robot with Full-Circle End-Effector Rotations
Jan 04, 2021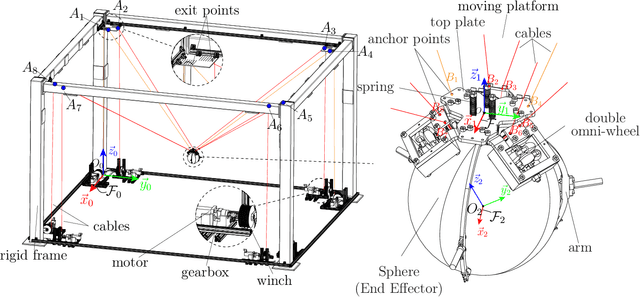
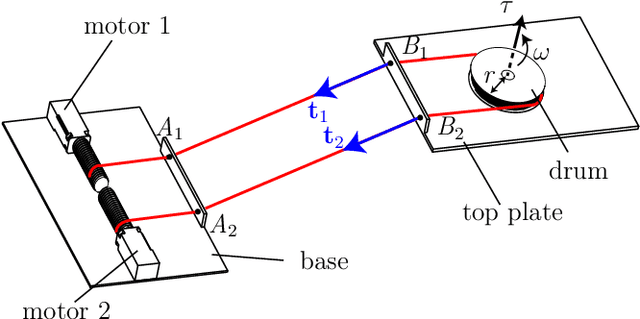
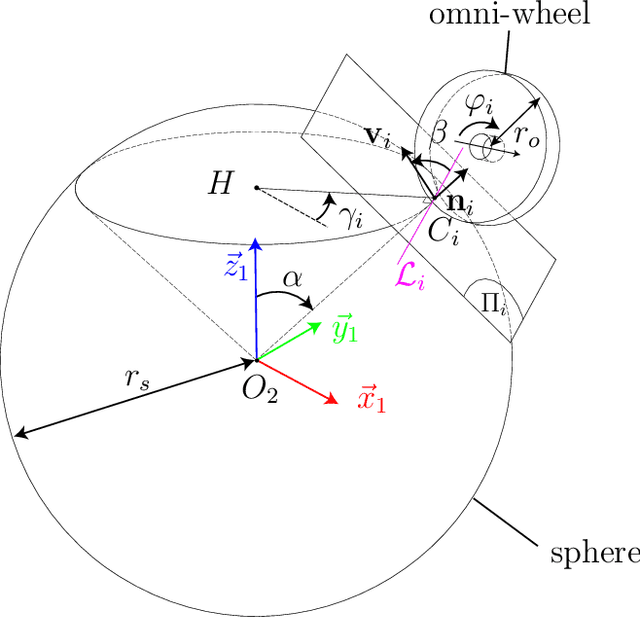
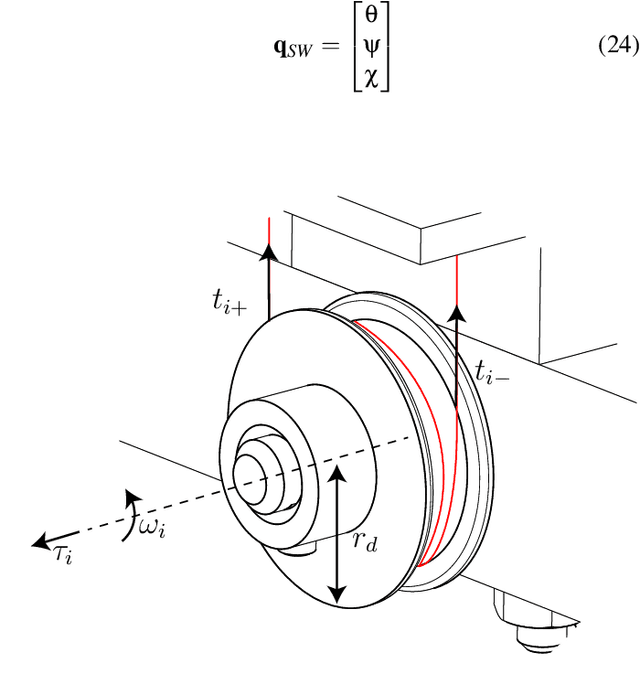
Cable-Driven Parallel Robots (CDPRs) offer high payload capacities, large translational workspace and high dynamic performances. The rigid base frame of the CDPR is connected in parallel to the moving platform using cables. However, their orientation workspace is usually limited due to cable/cable and cable/moving platform collisions. This paper deals with the design, modelling and prototyping of a hybrid robot. This robot, which is composed of a CDPR mounted in series with a Parallel Spherical Wrist (PSW), has both a large translational workspace and an unlimited orientation workspace. It should be noted that the six degrees of freedom (DOF) motions of the moving platform of the CDPR, namely, the base of the PSW, and the three-DOF motion of the PSW are actuated by means of eight actuators fixed to the base. As a consequence, the overall system is underactuated and its total mass and inertia in motion is reduced.