 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArtificial Intelligence for Modeling & Simulation in Digital Twins
Feb 22, 2026The convergence of modeling & simulation (M&S) and artificial intelligence (AI) is leaving its marks on advanced digital technology. Pertinent examples are digital twins (DTs) - high-fidelity, live representations of physical assets, and frequent enablers of corporate digital maturation and transformation. Often seen as technological platforms that integrate an array of services, DTs have the potential to bring AI-enabled M&S closer to end-users. It is, therefore, paramount to understand the role of M&S in DTs, and the role of digital twins in enabling the convergence of AI and M&S. To this end, this chapter provides a comprehensive exploration of the complementary relationship between these three. We begin by establishing a foundational understanding of DTs by detailing their key components, architectural layers, and their various roles across business, development, and operations. We then examine the central role of M&S in DTs and provide an overview of key modeling techniques from physics-based and discrete-event simulation to hybrid approaches. Subsequently, we investigate the bidirectional role of AI: first, how AI enhances DTs through advanced analytics, predictive capabilities, and autonomous decision-making, and second, how DTs serve as valuable platforms for training, validating, and deploying AI models. The chapter concludes by identifying key challenges and future research directions for creating more integrated and intelligent systems.
Action Representations in Robotics: A Taxonomy and Systematic Classification
Sep 12, 2018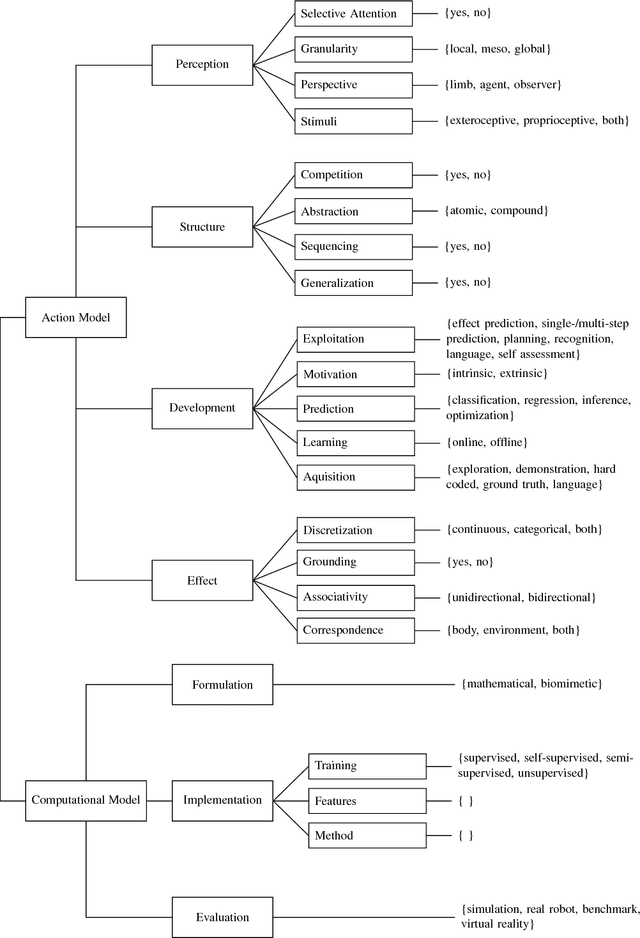
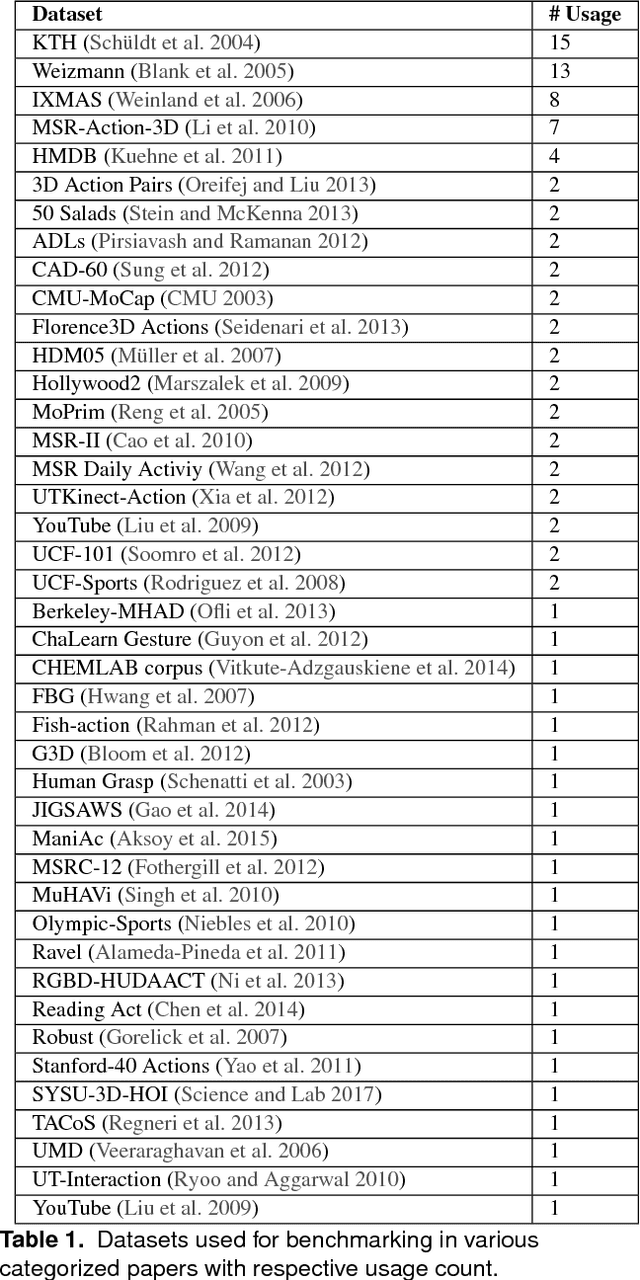
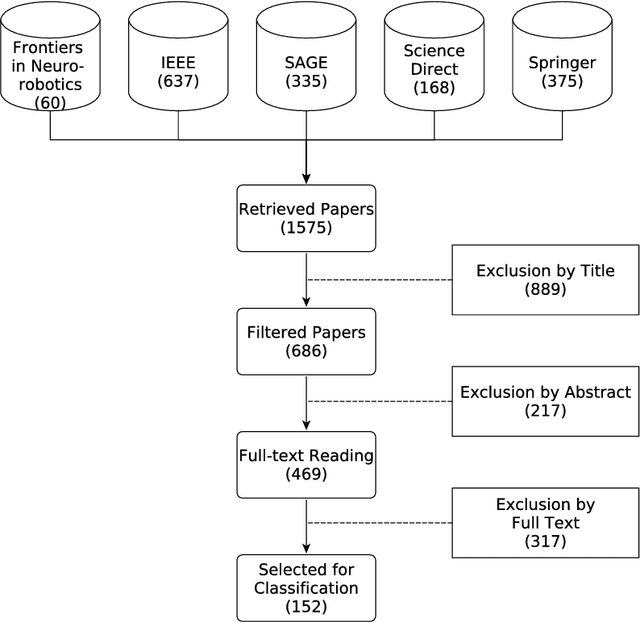
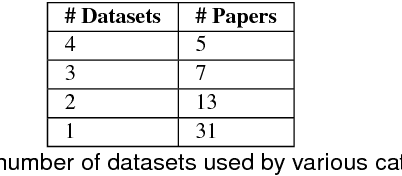
Understanding and defining the meaning of "action" is substantial for robotics research. This becomes utterly evident when aiming at equipping autonomous robots with robust manipulation skills for action execution. Unfortunately, to this day we still lack both a clear understanding of the concept of an action and a set of established criteria that ultimately characterize an action. In this survey we thus first review existing ideas and theories on the notion and meaning of action. Subsequently we discuss the role of action in robotics and attempt to give a seminal definition of action in accordance with its use in robotics research. Given this definition we then introduce a taxonomy for categorizing action representations in robotics along various dimensions. Finally, we provide a systematic literature survey on action representations in robotics where we categorize relevant literature along our taxonomy. After discussing the current state of the art we conclude with an outlook towards promising research directions.
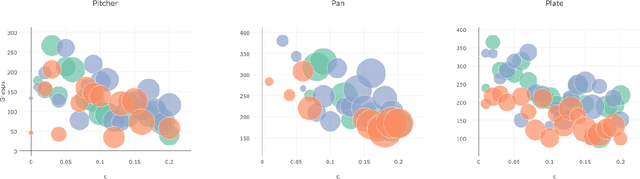
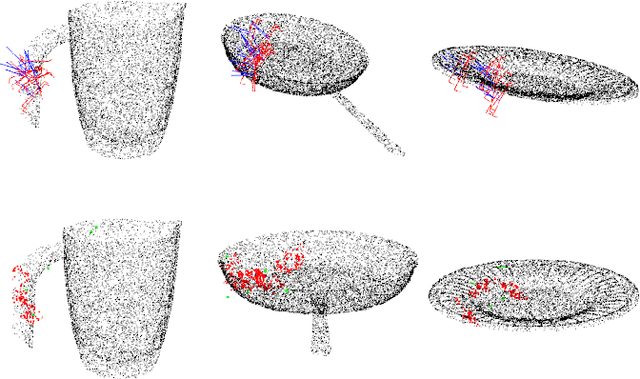
Active and Transfer Learning of Grasps by Kernel Adaptive MCMC
Nov 19, 2016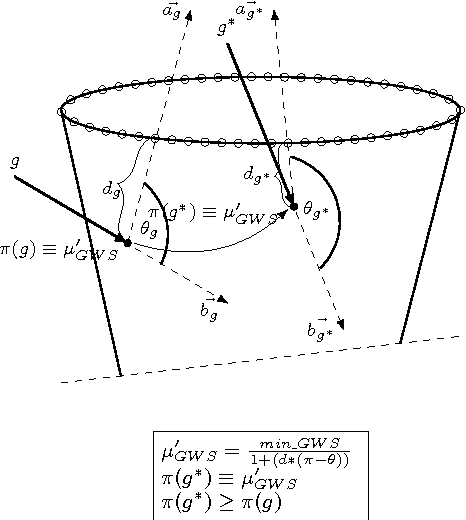
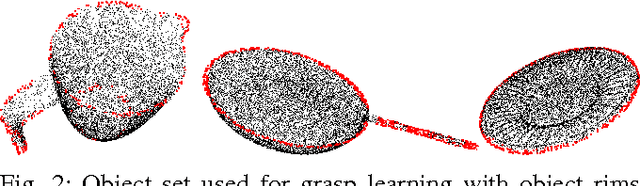
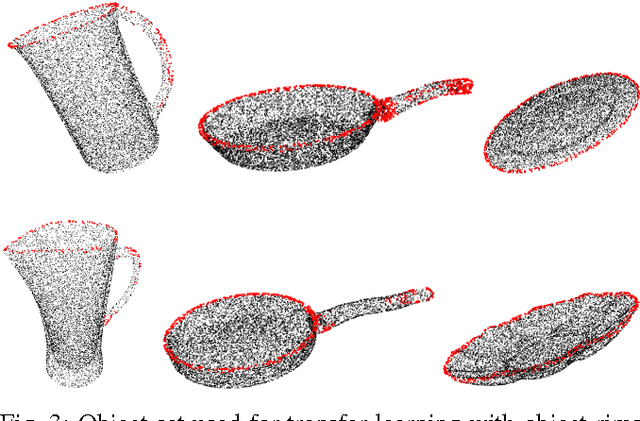
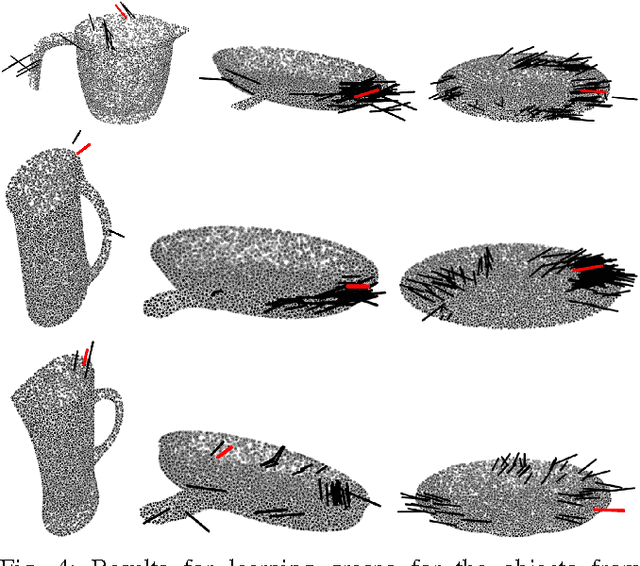
Human ability of both versatile grasping of given objects and grasping of novel (as of yet unseen) objects is truly remarkable. This probably arises from the experience infants gather by actively playing around with diverse objects. Moreover, knowledge acquired during this process is reused during learning of how to grasp novel objects. We conjecture that this combined process of active and transfer learning boils down to a random search around an object, suitably biased by prior experience, to identify promising grasps. In this paper we present an active learning method for learning of grasps for given objects, and a transfer learning method for learning of grasps for novel objects. Our learning methods apply a kernel adaptive Metropolis-Hastings sampler that learns an approximation of the grasps' probability density of an object while drawing grasp proposals from it. The sampler employs simulated annealing to search for globally-optimal grasps. Our empirical results show promising applicability of our proposed learning schemes.
Active and Transfer Learning of Grasps by Sampling from Demonstration
Nov 19, 2016
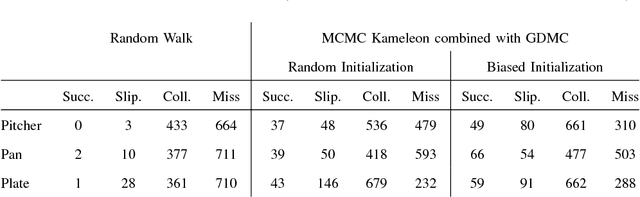
We guess humans start acquiring grasping skills as early as at the infant stage by virtue of two key processes. First, infants attempt to learn grasps for known objects by imitating humans. Secondly, knowledge acquired during this process is reused in learning to grasp novel objects. We argue that these processes of active and transfer learning boil down to a random search of grasps on an object, suitably biased by prior experience. In this paper we introduce active learning of grasps for known objects as well as transfer learning of grasps for novel objects grounded on kernel adaptive, mode-hopping Markov Chain Monte Carlo. Our experiments show promising applicability of our proposed learning methods.
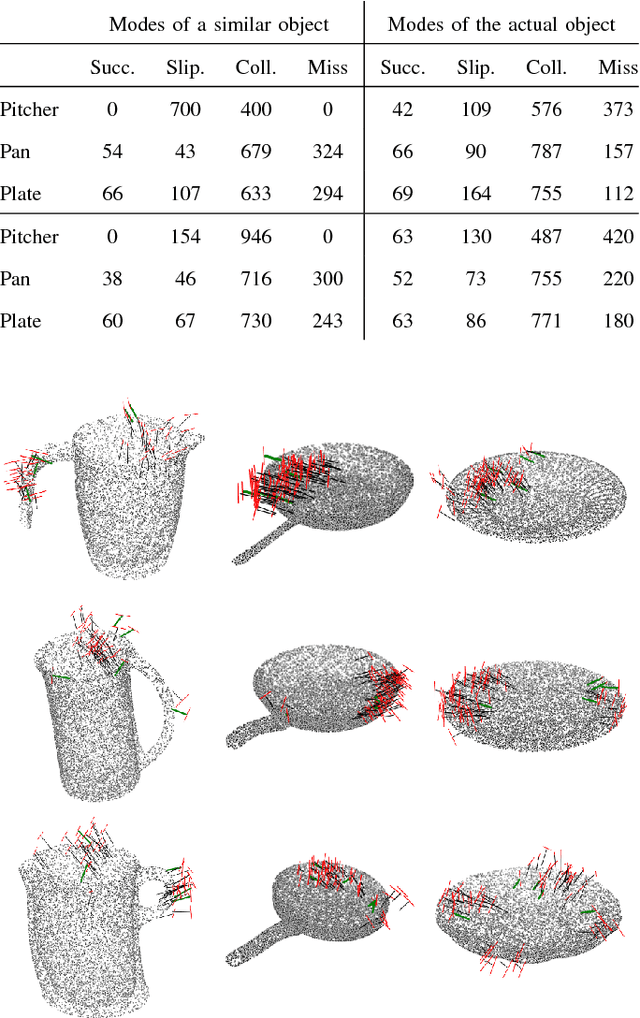
Grasp Learning by Sampling from Demonstration
Nov 19, 2016

Robotic grasping traditionally relies on object features or shape information for learning new or applying already learned grasps. We argue however that such a strong reliance on object geometric information renders grasping and grasp learning a difficult task in the event of cluttered environments with high uncertainty where reasonable object models are not available. This being so, in this paper we thus investigate the application of model-free stochastic optimization for grasp learning. For this, our proposed learning method requires just a handful of user-demonstrated grasps and an initial prior by a rough sketch of an object's grasp affordance density, yet no object geometric knowledge except for its pose. Our experiments show promising applicability of our proposed learning method.