Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive and Transfer Learning of Grasps by Sampling from Demonstration
Paper and Code
Nov 19, 2016
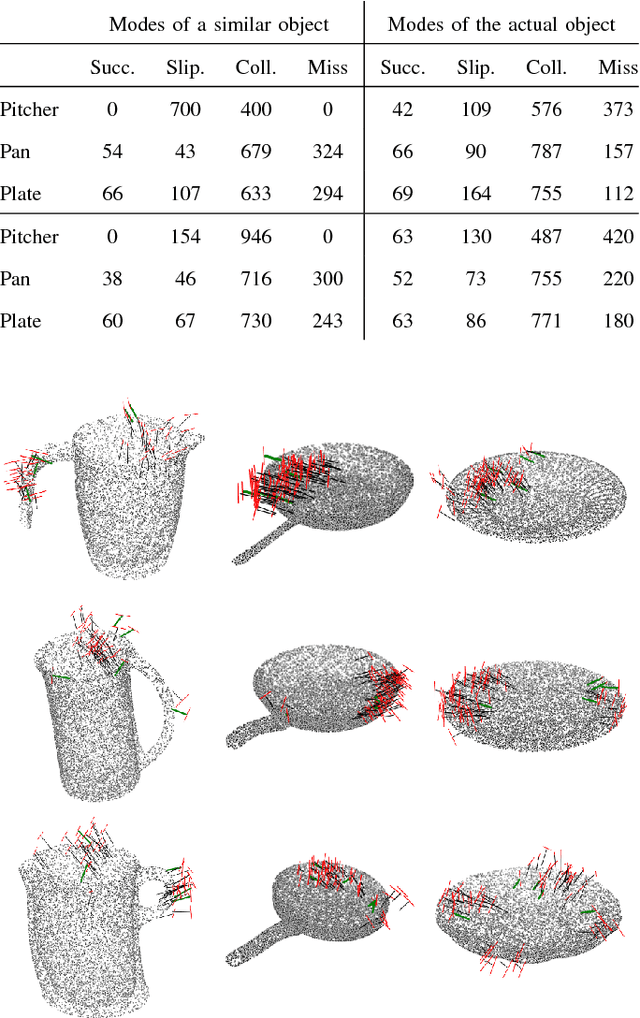
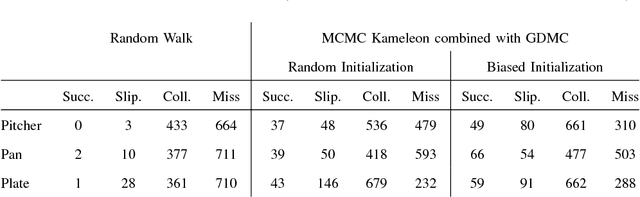
We guess humans start acquiring grasping skills as early as at the infant stage by virtue of two key processes. First, infants attempt to learn grasps for known objects by imitating humans. Secondly, knowledge acquired during this process is reused in learning to grasp novel objects. We argue that these processes of active and transfer learning boil down to a random search of grasps on an object, suitably biased by prior experience. In this paper we introduce active learning of grasps for known objects as well as transfer learning of grasps for novel objects grounded on kernel adaptive, mode-hopping Markov Chain Monte Carlo. Our experiments show promising applicability of our proposed learning methods.
* 6 pages, 3 figures, 3 tables, technical report. arXiv admin note:
substantial text overlap with arXiv:1611.06366
View paper on