 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStochastic Geometry for Modeling and Analysis of Sensing and Communications: A Survey
Mar 12, 2025



One of the most promising technologies for next-generation wireless networks is integrated communication and sensing (ISAC). It is considered a key enabler for applications that require both enhanced communication and accurate sensing capabilities. Examples of such applications include smart environments, augmented and virtual reality, or the internet of things, where the capabilities of intelligent sensing and broadband communications are vital. Therefore, ISAC has attracted the research interest of both academia and industry, and many investigations have been carried out over the past decade. The articles in the literature include system models, performance evaluation, and optimization studies of several ISAC alternative designs. Stochastic geometry is the study and analysis of random spatial patterns, and as such, stochastic geometry tools have been considered for the performance evaluation of wireless networks with different types of nodes. In this paper, we aim to provide a comprehensive survey of current research progress in performance evaluation of ISAC systems using stochastic geometry tools. The survey covers terrestrial, aerial, and vehicular networks, where the random spatial location of the corresponding network elements and propagation scatterers and/or blockages is treated with various point processes. The paper starts with a short tutorial on ISAC technology, stochastic geometry tools, and metrics used in performance evaluation of communication and sensing. Then, the technical components of the system models utilized in the surveyed papers are discussed. Subsequently, we present the key results of the literature in all types of networks using three levels of integration: sensing-assisted communication, communication-assisted sensing, and joint sensing and communication. Finally, future research challenges and promising directions are discussed.
Joint Energy and SINR Coverage Probability in UAV Corridor-assisted RF-powered IoT Networks
Sep 12, 2024



This letter studies the joint energy and signal-to-interference-plus-noise (SINR)-based coverage probability in Unmanned Aerial Vehicle (UAV)-assisted radio frequency (RF)-powered Internet of Things (IoT) networks. The UAVs are spatially distributed in an aerial corridor that is modeled as a one-dimensional (1D) binomial point process (BPP). By accurately capturing the line-of-sight (LoS) probability of a UAV through large-scale fading i) an exact form expression for the energy coverage probability is derived, and ii) a tight approximation for the overall coverage performance is obtained. Among several key findings, numerical results reveal the optimal number of deployed UAV-BSs that maximizes the joint coverage probability, as well as the optimal length of the UAV corridors when designing such UAV-assisted IoT networks.
A Survey on UAV-Aided Maritime Communications: Deployment Considerations, Applications, and Future Challenges
Sep 20, 2022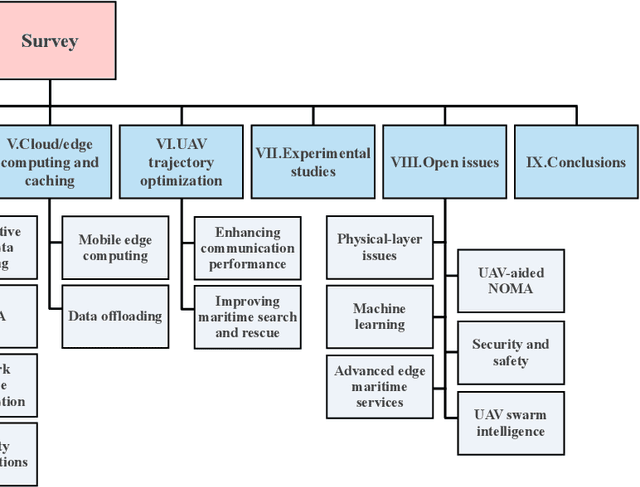
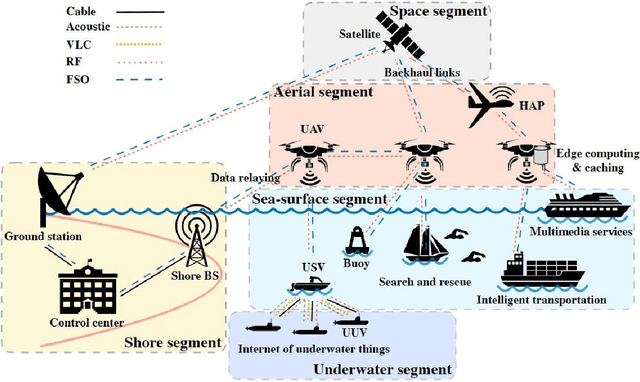
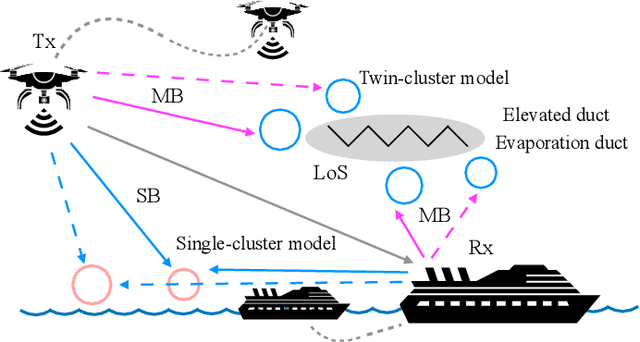
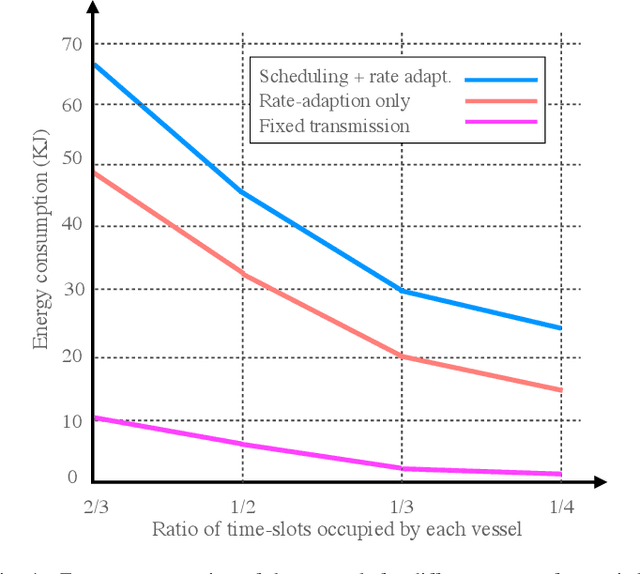
Maritime activities represent a major domain of economic growth with several emerging maritime Internet of Things use cases, such as smart ports, autonomous navigation, and ocean monitoring systems. The major enabler for this exciting ecosystem is the provision of broadband, low-delay, and reliable wireless coverage to the ever-increasing number of vessels, buoys, platforms, sensors, and actuators. Towards this end, the integration of unmanned aerial vehicles (UAVs) in maritime communications introduces an aerial dimension to wireless connectivity going above and beyond current deployments, which are mainly relying on shore-based base stations with limited coverage and satellite links with high latency. Considering the potential of UAV-aided wireless communications, this survey presents the state-of-the-art in UAV-aided maritime communications, which, in general, are based on both conventional optimization and machine-learning-aided approaches. More specifically, relevant UAV-based network architectures are discussed together with the role of their building blocks. Then, physical-layer, resource management, and cloud/edge computing and caching UAV-aided solutions in maritime environments are discussed and grouped based on their performance targets. Moreover, as UAVs are characterized by flexible deployment with high re-positioning capabilities, studies on UAV trajectory optimization for maritime applications are thoroughly discussed. In addition, aiming at shedding light on the current status of real-world deployments, experimental studies on UAV-aided maritime communications are presented and implementation details are given. Finally, several important open issues in the area of UAV-aided maritime communications are given, related to the integration of sixth generation (6G) advancements.