 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Dynamic Framework for Grid Adaptation in Kolmogorov-Arnold Networks
Jan 26, 2026Kolmogorov-Arnold Networks (KANs) have recently demonstrated promising potential in scientific machine learning, partly due to their capacity for grid adaptation during training. However, existing adaptation strategies rely solely on input data density, failing to account for the geometric complexity of the target function or metrics calculated during network training. In this work, we propose a generalized framework that treats knot allocation as a density estimation task governed by Importance Density Functions (IDFs), allowing training dynamics to determine grid resolution. We introduce a curvature-based adaptation strategy and evaluate it across synthetic function fitting, regression on a subset of the Feynman dataset and different instances of the Helmholtz PDE, demonstrating that it significantly outperforms the standard input-based baseline. Specifically, our method yields average relative error reductions of 25.3% on synthetic functions, 9.4% on the Feynman dataset, and 23.3% on the PDE benchmark. Statistical significance is confirmed via Wilcoxon signed-rank tests, establishing curvature-based adaptation as a robust and computationally efficient alternative for KAN training.
A Survey on UAV-Aided Maritime Communications: Deployment Considerations, Applications, and Future Challenges
Sep 20, 2022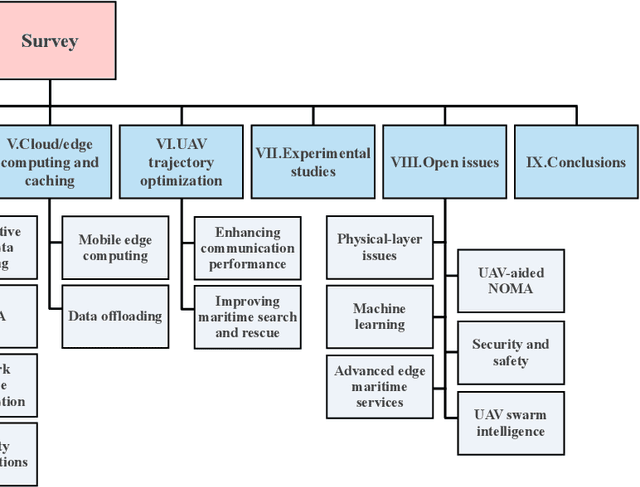
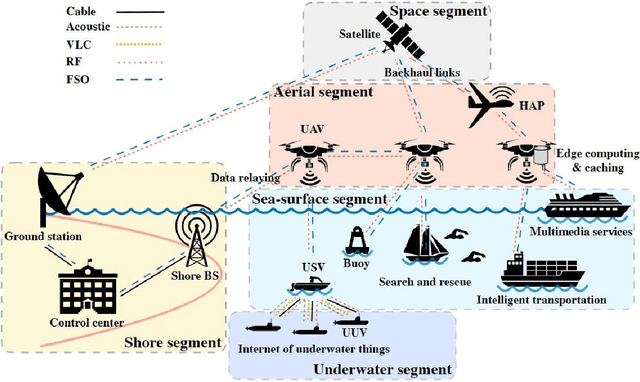
Maritime activities represent a major domain of economic growth with several emerging maritime Internet of Things use cases, such as smart ports, autonomous navigation, and ocean monitoring systems. The major enabler for this exciting ecosystem is the provision of broadband, low-delay, and reliable wireless coverage to the ever-increasing number of vessels, buoys, platforms, sensors, and actuators. Towards this end, the integration of unmanned aerial vehicles (UAVs) in maritime communications introduces an aerial dimension to wireless connectivity going above and beyond current deployments, which are mainly relying on shore-based base stations with limited coverage and satellite links with high latency. Considering the potential of UAV-aided wireless communications, this survey presents the state-of-the-art in UAV-aided maritime communications, which, in general, are based on both conventional optimization and machine-learning-aided approaches. More specifically, relevant UAV-based network architectures are discussed together with the role of their building blocks. Then, physical-layer, resource management, and cloud/edge computing and caching UAV-aided solutions in maritime environments are discussed and grouped based on their performance targets. Moreover, as UAVs are characterized by flexible deployment with high re-positioning capabilities, studies on UAV trajectory optimization for maritime applications are thoroughly discussed. In addition, aiming at shedding light on the current status of real-world deployments, experimental studies on UAV-aided maritime communications are presented and implementation details are given. Finally, several important open issues in the area of UAV-aided maritime communications are given, related to the integration of sixth generation (6G) advancements.