 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntersection over Union with smoothing for bounding box regression
Mar 28, 2023We focus on the construction of a loss function for the bounding box regression. The Intersection over Union (IoU) metric is improved to converge faster, to make the surface of the loss function smooth and continuous over the whole searched space, and to reach a more precise approximation of the labels. The main principle is adding a smoothing part to the original IoU, where the smoothing part is given by a linear space with values that increases from the ground truth bounding box to the border of the input image, and thus covers the whole spatial search space. We show the motivation and formalism behind this loss function and experimentally prove that it outperforms IoU, DIoU, CIoU, and SIoU by a large margin. We experimentally show that the proposed loss function is robust with respect to the noise in the dimension of ground truth bounding boxes. The reference implementation is available at gitlab.com/irafm-ai/smoothing-iou.
Effective black box adversarial attack with handcrafted kernels
Mar 24, 2023



We propose a new, simple framework for crafting adversarial examples for black box attacks. The idea is to simulate the substitution model with a non-trainable model compounded of just one layer of handcrafted convolutional kernels and then train the generator neural network to maximize the distance of the outputs for the original and generated adversarial image. We show that fooling the prediction of the first layer causes the whole network to be fooled and decreases its accuracy on adversarial inputs. Moreover, we do not train the neural network to obtain the first convolutional layer kernels, but we create them using the technique of F-transform. Therefore, our method is very time and resource effective.
Unproportional mosaicing
Mar 06, 2023Data shift is a gap between data distribution used for training and data distribution encountered in the real-world. Data augmentations help narrow the gap by generating new data samples, increasing data variability, and data space coverage. We present a new data augmentation: Unproportional mosaicing (Unprop). Our augmentation randomly splits an image into various-sized blocks and swaps its content (pixels) while maintaining block sizes. Our method achieves a lower error rate when combined with other state-of-the-art augmentations.
Coastline extraction from ALOS-2 satellite SAR images
Apr 10, 2021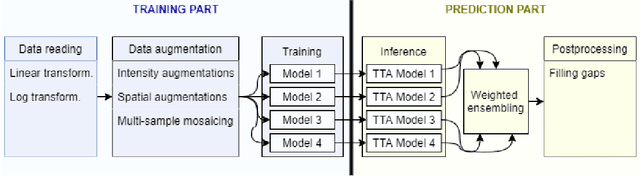
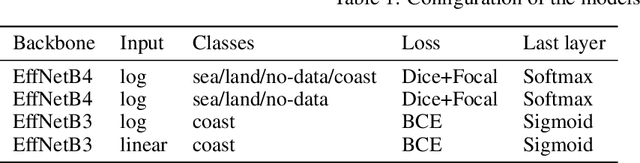


The continuous monitoring of a shore plays an essential role in designing strategies for shore protection against erosion. To avoid the effect of clouds and sunlight, satellite-based imagery with synthetic aperture radar is used to provide the required data. We show how such data can be processed using state-of-the-art methods, namely, by a deep-learning-based approach, to detect the coastline location. We split the process into data reading, data preprocessing, model training, inference, ensembling, and postprocessing, and describe the best techniques for each of the parts. Finally, we present our own solution that is able to precisely extract the coastline from an image even if it is not recognizable by a human. Our solution has been validated against the real GPS location of the coastline during Signate's competition, where it was runner-up among 109 teams across the whole world.
Poly-YOLO: higher speed, more precise detection and instance segmentation for YOLOv3
May 29, 2020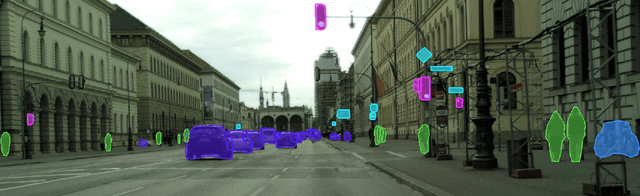
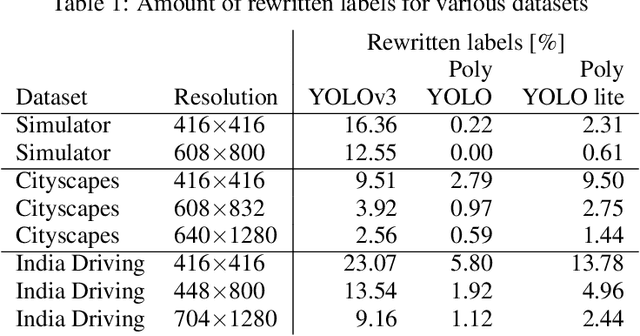

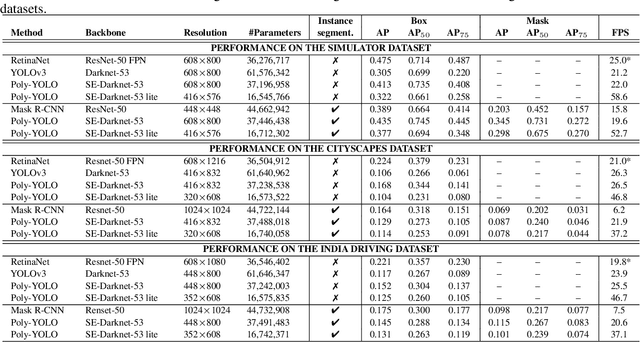
We present a new version of YOLO with better performance and extended with instance segmentation called Poly-YOLO. Poly-YOLO builds on the original ideas of YOLOv3 and removes two of its weaknesses: a large amount of rewritten labels and inefficient distribution of anchors. Poly-YOLO reduces the issues by aggregating features from a light SE-Darknet-53 backbone with a hypercolumn technique, using stairstep upsampling, and produces a single scale output with high resolution. In comparison with YOLOv3, Poly-YOLO has only 60% of its trainable parameters but improves mAP by a relative 40%. We also present Poly-YOLO lite with fewer parameters and a lower output resolution. It has the same precision as YOLOv3, but it is three times smaller and twice as fast, thus suitable for embedded devices. Finally, Poly-YOLO performs instance segmentation using bounding polygons. The network is trained to detect size-independent polygons defined on a polar grid. Vertices of each polygon are being predicted with their confidence, and therefore Poly-YOLO produces polygons with a varying number of vertices.