 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComplete Autonomous Robotic Nasopharyngeal Swab System with Evaluation on a Stochastically Moving Phantom Head
Aug 23, 2024
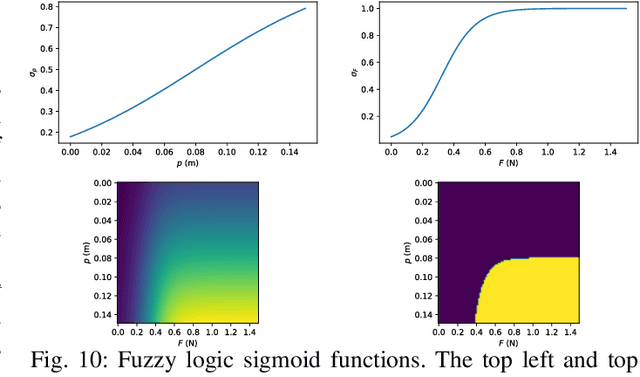


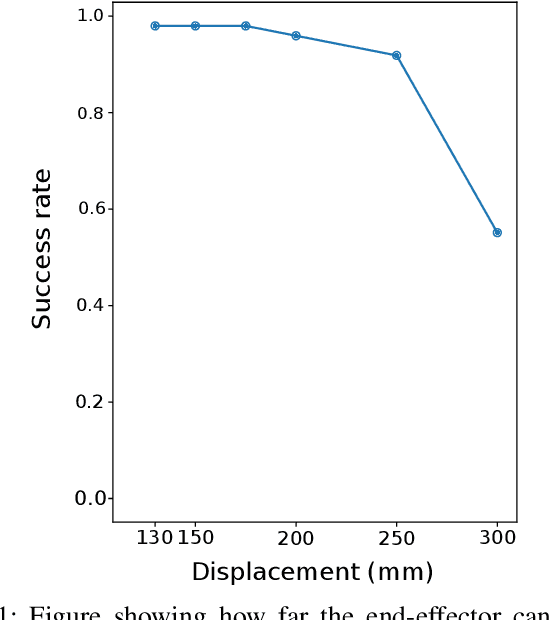
The application of autonomous robotics to close-contact healthcare tasks has a clear role for the future due to its potential to reduce infection risks to staff and improve clinical efficiency. Nasopharyngeal (NP) swab sample collection for diagnosing upper-respiratory illnesses is one type of close contact task that is interesting for robotics due to the dexterity requirements and the unobservability of the nasal cavity. We propose a control system that performs the test using a collaborative manipulator arm with an instrumented end-effector to take visual and force measurements, under the scenario that the patient is unrestrained and the tools are general enough to be applied to other close contact tasks. The system employs a visual servo controller to align the swab with the nostrils. A compliant joint velocity controller inserts the swab along a trajectory optimized through a simulation environment, that also reacts to measured forces applied to the swab. Additional subsystems include a fuzzy logic system for detecting when the swab reaches the nasopharynx and a method for detaching the swab and aborting the procedure if safety criteria is violated. The system is evaluated using a second robotic arm that holds a nasal cavity phantom and simulates the natural head motions that could occur during the procedure. Through extensive experiments, we identify controller configurations capable of effectively performing the NP swab test even with significant head motion, which demonstrates the safety and reliability of the system.
Robotic Eye-in-hand Visual Servo Axially Aligning Nasopharyngeal Swabs with the Nasal Cavity
Aug 22, 2024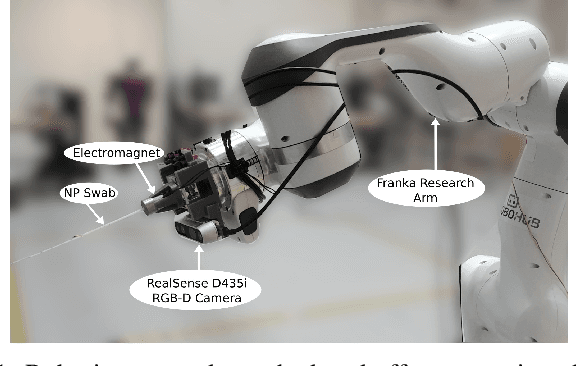
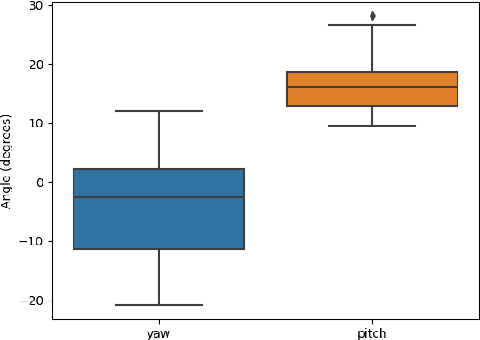
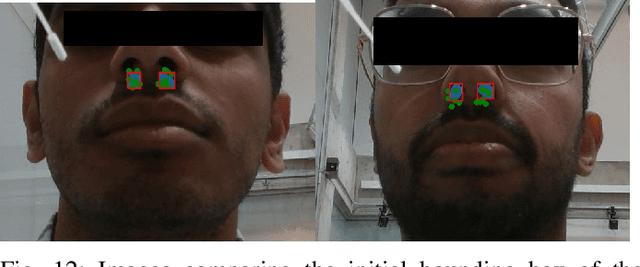
The nasopharyngeal (NP) swab test is a method for collecting cultures to diagnose for different types of respiratory illnesses, including COVID-19. Delegating this task to robots would be beneficial in terms of reducing infection risks and bolstering the healthcare system, but a critical component of the NP swab test is having the swab aligned properly with the nasal cavity so that it does not cause excessive discomfort or injury by traveling down the wrong passage. Existing research towards robotic NP swabbing typically assumes the patient's head is held within a fixture. This simplifies the alignment problem, but is also dissimilar to clinical scenarios where patients are typically free-standing. Consequently, our work creates a vision-guided pipeline to allow an instrumented robot arm to properly position and orient NP swabs with respect to the nostrils of free-standing patients. The first component of the pipeline is a precomputed joint lookup table to allow the arm to meet the patient's arbitrary position in the designated workspace, while avoiding joint limits. Our pipeline leverages semantic face models from computer vision to estimate the Euclidean pose of the face with respect to a monocular RGB-D camera placed on the end-effector. These estimates are passed into an unscented Kalman filter on manifolds state estimator and a pose based visual servo control loop to move the swab to the designated pose in front of the nostril. Our pipeline was validated with human trials, featuring a cohort of 25 participants. The system is effective, reaching the nostril for 84% of participants, and our statistical analysis did not find significant demographic biases within the cohort.
Collaborative Robot Arm Inserting Nasopharyngeal Swabs with Admittance Control
Aug 21, 2024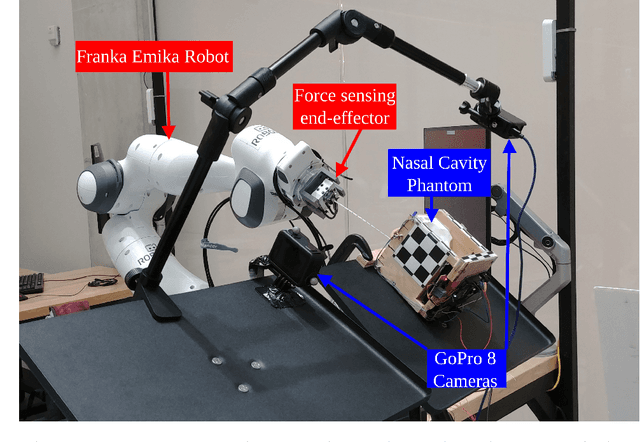
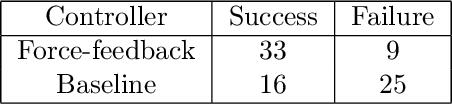
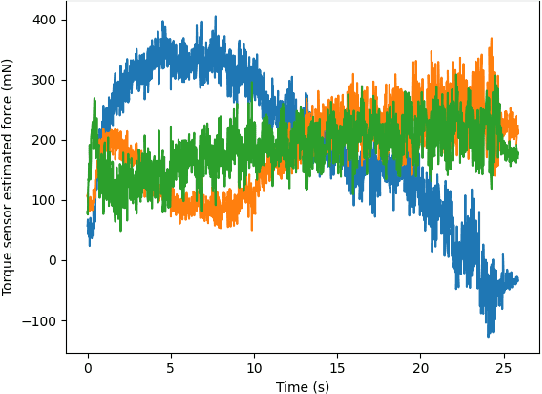

The nasopharyngeal (NP) swab sample test, commonly used to detect COVID-19 and other respiratory illnesses, involves moving a swab through the nasal cavity to collect samples from the nasopharynx. While typically this is done by human healthcare workers, there is a significant societal interest to enable robots to do this test to reduce exposure to patients and to free up human resources. The task is challenging from the robotics perspective because of the dexterity and safety requirements. While other works have implemented specific hardware solutions, our research differentiates itself by using a ubiquitous rigid robotic arm. This work presents a case study where we investigate the strengths and challenges using compliant control system to accomplish NP swab tests with such a robotic configuration. To accomplish this, we designed a force sensing end-effector that integrates with the proposed torque controlled compliant control loop. We then conducted experiments where the robot inserted NP swabs into a 3D printed nasal cavity phantom. Ultimately, we found that the compliant control system outperformed a basic position controller and shows promise for human use. However, further efforts are needed to ensure the initial alignment with the nostril and to address head motion.
Sentinel-1 Additive Noise Removal from Cross-Polarization Extra-Wide TOPSAR with Dynamic Least-Squares
Jul 12, 2021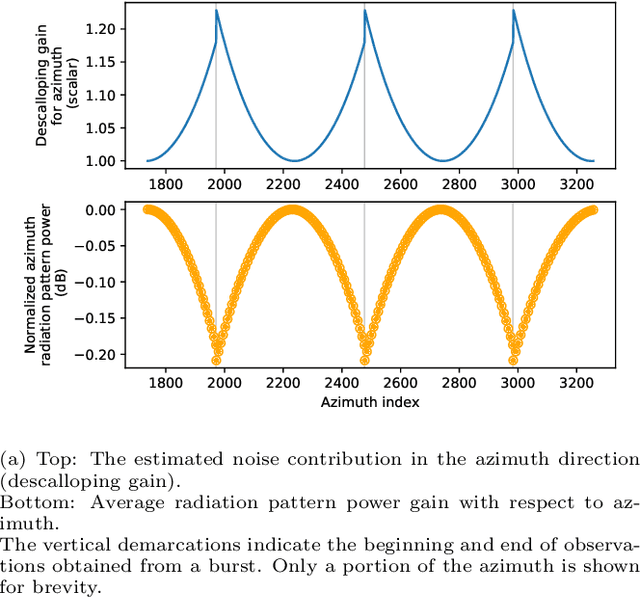

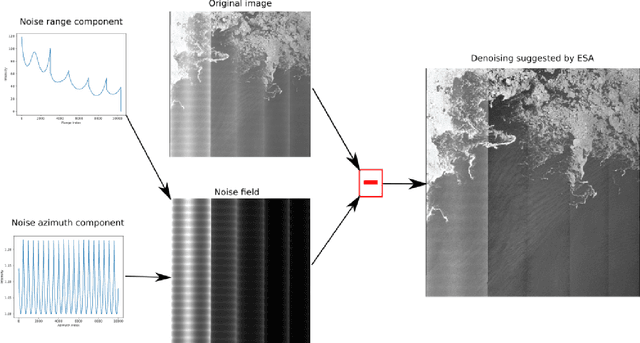

Sentinel-1 is a synthetic aperture radar (SAR) platform with an operational mode called extra wide (EW) that offers large regions of ocean areas to be observed. A major issue with EW images is that the cross-polarized HV and VH channels have prominent additive noise patterns relative to low backscatter intensity, which disrupts tasks that require manual or automated interpretation. The European Space Agency (ESA) provides a method for removing the additive noise pattern by means of lookup tables, but applying them directly produces unsatisfactory results because characteristics of the noise still remain. Furthermore, evidence suggests that the magnitude of the additive noise dynamically depends on factors that are not considered by the ESA estimated noise field. To address these issues we propose a quadratic objective function to model the mis-scale of the provided noise field on an image. We consider a linear denoising model that re-scales the noise field for each subswath, whose parameters are found from a least-squares solution over the objective function. This method greatly reduces the presence of additive noise while not requiring a set of training images, is robust to heterogeneity in images, dynamically estimates parameters for each image, and finds parameters using a closed-form solution. Two experiments were performed to validate the proposed method. The first experiment simulated noise removal on a set of RADARSAT-2 images with noise fields artificially imposed on them. The second experiment conducted noise removal on a set of Sentinel-1 images taken over the five oceans. Afterwards, quality of the noise removal was evaluated based on the appearance of open-water. The two experiments indicate that the proposed method marks an improvement both visually and through numerical measures.
* 22 pages, 14 figures