 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian Processes Over Graphs
Mar 20, 2018

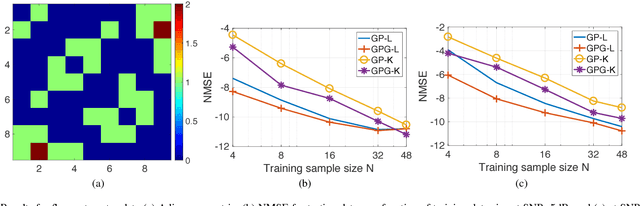

We propose Gaussian processes for signals over graphs (GPG) using the apriori knowledge that the target vectors lie over a graph. We incorporate this information using a graph- Laplacian based regularization which enforces the target vectors to have a specific profile in terms of graph Fourier transform coeffcients, for example lowpass or bandpass graph signals. We discuss how the regularization affects the mean and the variance in the prediction output. In particular, we prove that the predictive variance of the GPG is strictly smaller than the conventional Gaussian process (GP) for any non-trivial graph. We validate our concepts by application to various real-world graph signals. Our experiments show that the performance of the GPG is superior to GP for small training data sizes and under noisy training.
Multi-kernel Regression For Graph Signal Processing
Mar 12, 2018


We develop a multi-kernel based regression method for graph signal processing where the target signal is assumed to be smooth over a graph. In multi-kernel regression, an effective kernel function is expressed as a linear combination of many basis kernel functions. We estimate the linear weights to learn the effective kernel function by appropriate regularization based on graph smoothness. We show that the resulting optimization problem is shown to be convex and pro- pose an accelerated projected gradient descent based solution. Simulation results using real-world graph signals show efficiency of the multi-kernel based approach over a standard kernel based approach.
Extreme Learning Machine for Graph Signal Processing
Mar 12, 2018

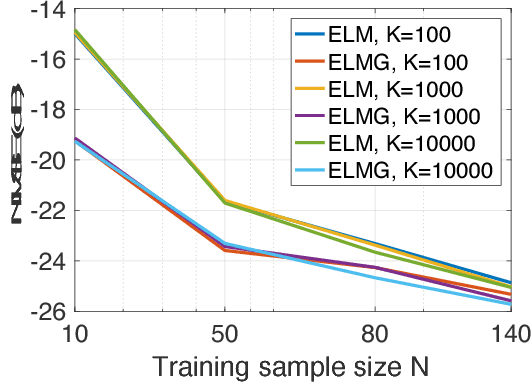

In this article, we improve extreme learning machines for regression tasks using a graph signal processing based regularization. We assume that the target signal for prediction or regression is a graph signal. With this assumption, we use the regularization to enforce that the output of an extreme learning machine is smooth over a given graph. Simulation results with real data confirm that such regularization helps significantly when the available training data is limited in size and corrupted by noise.
Cooperative localization by dual foot-mounted inertial sensors and inter-agent ranging
Nov 21, 2013

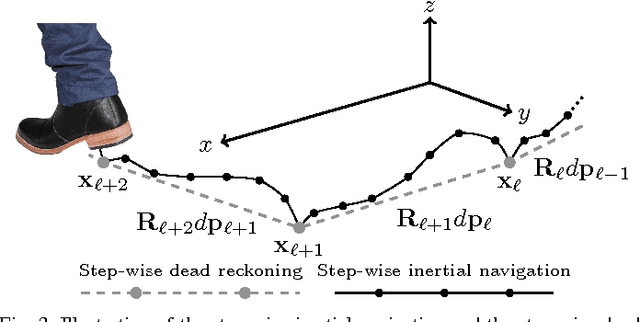

The implementation challenges of cooperative localization by dual foot-mounted inertial sensors and inter-agent ranging are discussed and work on the subject is reviewed. System architecture and sensor fusion are identified as key challenges. A partially decentralized system architecture based on step-wise inertial navigation and step-wise dead reckoning is presented. This architecture is argued to reduce the computational cost and required communication bandwidth by around two orders of magnitude while only giving negligible information loss in comparison with a naive centralized implementation. This makes a joint global state estimation feasible for up to a platoon-sized group of agents. Furthermore, robust and low-cost sensor fusion for the considered setup, based on state space transformation and marginalization, is presented. The transformation and marginalization are used to give the necessary flexibility for presented sampling based updates for the inter-agent ranging and ranging free fusion of the two feet of an individual agent. Finally, characteristics of the suggested implementation are demonstrated with simulations and a real-time system implementation.
* 14 pages
Recursive Bayesian Initialization of Localization Based on Ranging and Dead Reckoning
Jul 03, 2013



The initialization of the state estimation in a localization scenario based on ranging and dead reckoning is studied. Specifically, we start with a cooperative localization setup and consider the problem of recursively arriving at a uni-modal state estimate with sufficiently low covariance such that covariance based filters can be used to estimate an agent's state subsequently. A number of simplifications/assumptions are made such that the estimation problem can be seen as that of estimating the initial agent state given a deterministic surrounding and dead reckoning. This problem is solved by means of a particle filter and it is described how continual states and covariance estimates are derived from the solution. Finally, simulations are used to illustrate the characteristics of the method and experimental data are briefly presented.