 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative localization by dual foot-mounted inertial sensors and inter-agent ranging
Nov 21, 2013

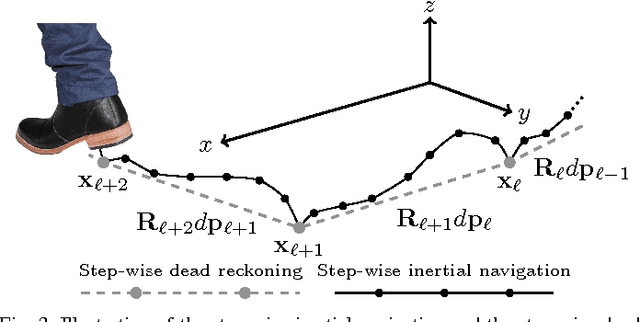

The implementation challenges of cooperative localization by dual foot-mounted inertial sensors and inter-agent ranging are discussed and work on the subject is reviewed. System architecture and sensor fusion are identified as key challenges. A partially decentralized system architecture based on step-wise inertial navigation and step-wise dead reckoning is presented. This architecture is argued to reduce the computational cost and required communication bandwidth by around two orders of magnitude while only giving negligible information loss in comparison with a naive centralized implementation. This makes a joint global state estimation feasible for up to a platoon-sized group of agents. Furthermore, robust and low-cost sensor fusion for the considered setup, based on state space transformation and marginalization, is presented. The transformation and marginalization are used to give the necessary flexibility for presented sampling based updates for the inter-agent ranging and ranging free fusion of the two feet of an individual agent. Finally, characteristics of the suggested implementation are demonstrated with simulations and a real-time system implementation.
* 14 pages
Recursive Bayesian Initialization of Localization Based on Ranging and Dead Reckoning
Jul 03, 2013



The initialization of the state estimation in a localization scenario based on ranging and dead reckoning is studied. Specifically, we start with a cooperative localization setup and consider the problem of recursively arriving at a uni-modal state estimate with sufficiently low covariance such that covariance based filters can be used to estimate an agent's state subsequently. A number of simplifications/assumptions are made such that the estimation problem can be seen as that of estimating the initial agent state given a deterministic surrounding and dead reckoning. This problem is solved by means of a particle filter and it is described how continual states and covariance estimates are derived from the solution. Finally, simulations are used to illustrate the characteristics of the method and experimental data are briefly presented.