 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Simulated real-world upper-body Exoskeleton Accident and Investigation
Nov 21, 2024


This paper describes the enactment of a simulated (mock) accident involving an upper-body exoskeleton and its investigation. The accident scenario is enacted by role-playing volunteers, one of whom is wearing the exoskeleton. Following the mock accident, investigators - also volunteers - interview both the subject of the accident and relevant witnesses. The investigators then consider the witness testimony alongside robot data logged by the ethical black box, in order to address the three key questions: what happened?, why did it happen?, and how can we make changes to prevent the accident happening again? This simulated accident scenario is one of a series we have run as part of the RoboTIPS project, with the overall aim of developing and testing both processes and technologies to support social robot accident investigation.
An Ethical Black Box for Social Robots: a draft Open Standard
May 13, 2022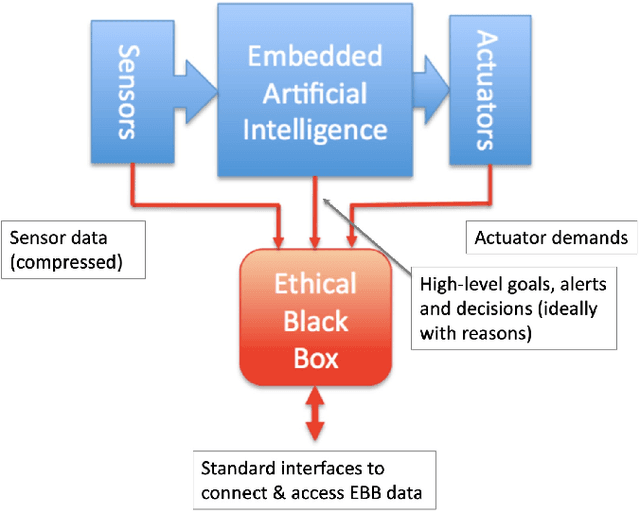


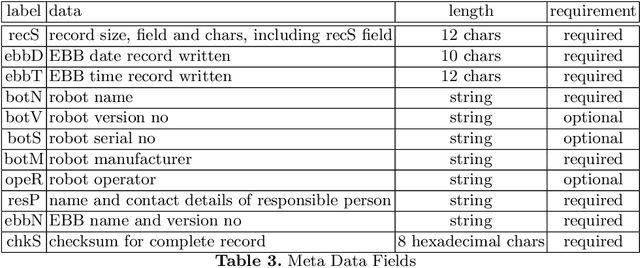
This paper introduces a draft open standard for the robot equivalent of an aircraft flight data recorder, which we call an ethical black box. This is a device, or software module, capable of securely recording operational data (sensor, actuator and control decisions) for a social robot, in order to support the investigation of accidents or near-miss incidents. The open standard, presented as an annex to this paper, is offered as a first draft for discussion within the robot ethics community. Our intention is to publish further drafts following feedback, in the hope that the standard will become a useful reference for social robot designers, operators and robot accident/incident investigators.