 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimum Snap Trajectory Generation and Control for an Under-actuated Flapping Wing Aerial Vehicle
Nov 02, 2023Minimum Snap Trajectory Generation and Control for an Under-actuated Flapping Wing Aerial VehicleThis paper presents both the trajectory generation and tracking control strategies for an underactuated flapping wing aerial vehicle (FWAV). First, the FWAV dynamics is analyzed in a practical perspective. Then, based on these analyses, we demonstrate the differential flatness of the FWAV system, and develop a general-purpose trajectory generation strategy. Subsequently, the trajectory tracking controller is developed with the help of robust control and switch control techniques. After that, the overall system asymptotic stability is guaranteed by Lyapunov stability analysis. To make the controller applicable in real flight, we also provide several instructions. Finally, a series of experiment results manifest the successful implementation of the proposed trajectory generation strategy and tracking control strategy. This work firstly achieves the closed-loop integration of trajectory generation and control for real 3-dimensional flight of an underactuated FWAV to a practical level.
Real-time Acceleration-continuous Path-constrained Trajectory Planning With Built-in Tradability Between Cruise and Time-optimal Motions
Dec 08, 2018
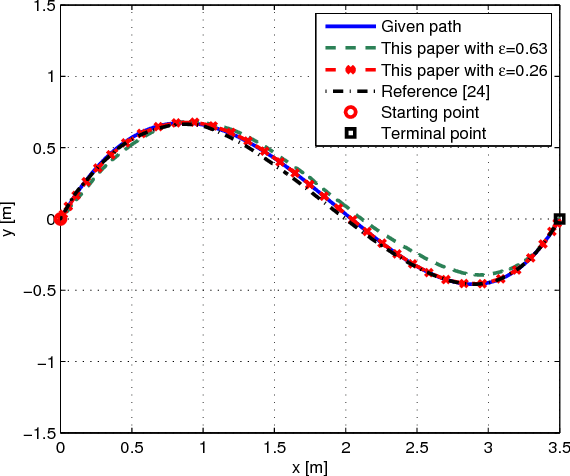
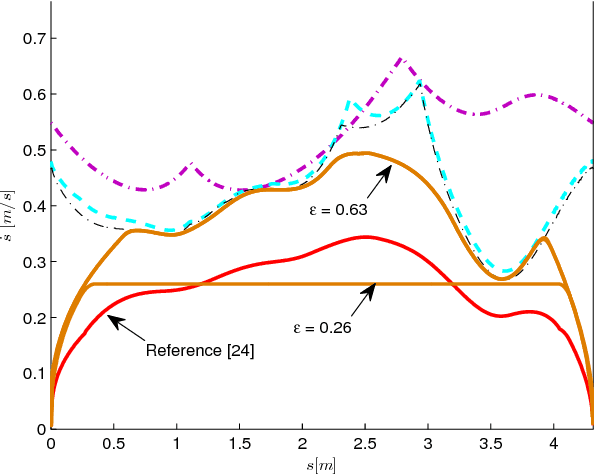

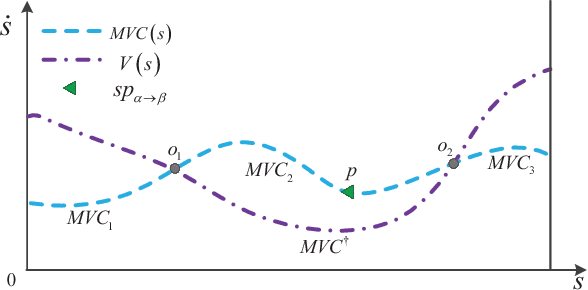
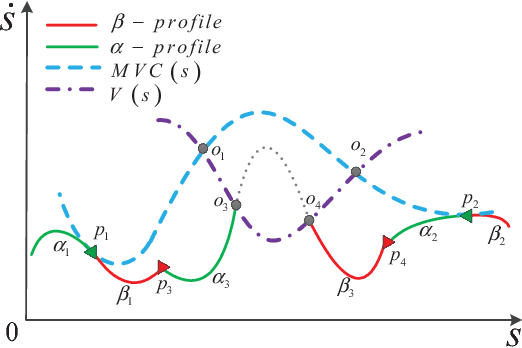
In this paper, a novel real-time acceleration-continuous path-constrained trajectory planning algorithm is proposed with an appealing built-in tradability mechanism between cruise motion and time-optimal motion. Different from existing approaches, the proposed approach smoothens time-optimal trajectories with bang-bang input structures to generate acceleration-continuous trajectories while preserving the completeness property. More importantly, a novel built-in tradability mechanism is proposed and embedded into the trajectory planning framework, so that the proportion of the cruise motion and time-optimal motion can be flexibly adjusted by changing a user-specified functional parameter. Thus, the user can easily apply the trajectory planning algorithm for various tasks with different requirements on motion efficiency and cruise proportion. Moreover, it is shown that feasible trajectories are computed more quickly than optimal trajectories. Rigorous mathematical analysis and proofs are provided for these aforementioned results. Comparative simulation and experimental results on omnidirectional wheeled mobile robots demonstrate the capability of the proposed algorithm in terms of flexible tunning between cruise and time-optimal motions, as well as higher computational efficiency.
Essential Properties of Numerical Integration for Time-optimal Trajectory Planning Along a Specified Path
Dec 09, 2016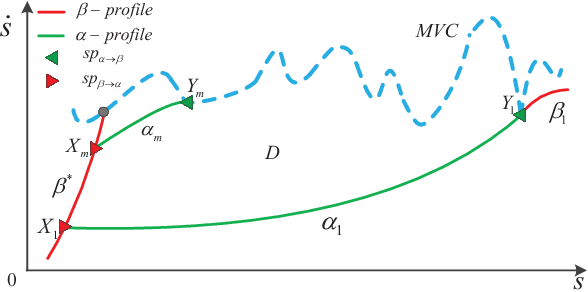

This letter summarizes some known properties and also presents several new properties of the Numerical Integration (NI) method for time-optimal trajectory planning along a specified path. The contribution is that rigorous mathematical proofs of these properties are presented, most of which cannot be found in existing literatures. We first give some properties regarding switch points and accelerating/decelerating curves of the NI method. Then, for the fact that when kinematic constraints are considered, the original version of NI which only considers torque constraints may result in failure of trajectory planning, we give the concrete failure conditions with rigorous mathematical proof. Accordingly, a failure detection algorithm is given in a run-and-test manner. Some simulation results on a unicycle vehicle are provided to verify those presented properties. Note that though those known properties are not discovered first, their mathematical proofs are given first in this letter. The detailed proofs make the theory of NI more complete and help interested readers to gain a thorough understanding of the method.