 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Acceleration-continuous Path-constrained Trajectory Planning With Built-in Tradability Between Cruise and Time-optimal Motions
Paper and Code
Dec 08, 2018
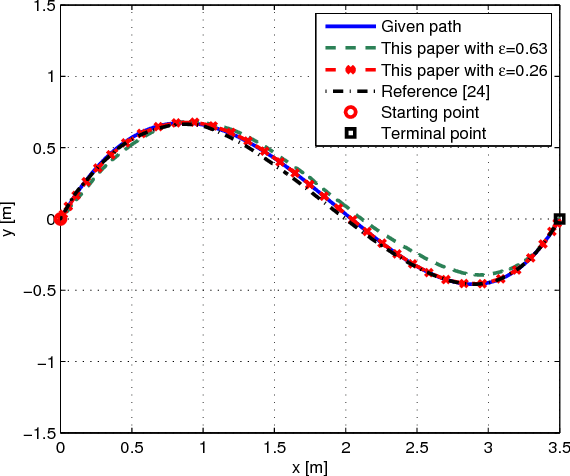
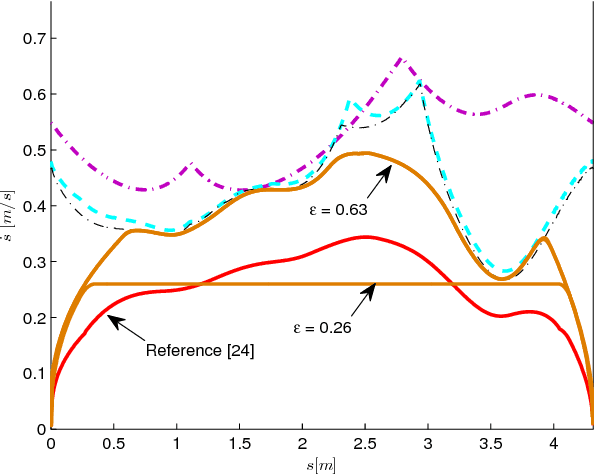

In this paper, a novel real-time acceleration-continuous path-constrained trajectory planning algorithm is proposed with an appealing built-in tradability mechanism between cruise motion and time-optimal motion. Different from existing approaches, the proposed approach smoothens time-optimal trajectories with bang-bang input structures to generate acceleration-continuous trajectories while preserving the completeness property. More importantly, a novel built-in tradability mechanism is proposed and embedded into the trajectory planning framework, so that the proportion of the cruise motion and time-optimal motion can be flexibly adjusted by changing a user-specified functional parameter. Thus, the user can easily apply the trajectory planning algorithm for various tasks with different requirements on motion efficiency and cruise proportion. Moreover, it is shown that feasible trajectories are computed more quickly than optimal trajectories. Rigorous mathematical analysis and proofs are provided for these aforementioned results. Comparative simulation and experimental results on omnidirectional wheeled mobile robots demonstrate the capability of the proposed algorithm in terms of flexible tunning between cruise and time-optimal motions, as well as higher computational efficiency.