 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Free versus Model-Based Reinforcement Learning for Fixed-Wing UAV Attitude Control Under Varying Wind Conditions
Sep 26, 2024



This paper evaluates and compares the performance of model-free and model-based reinforcement learning for the attitude control of fixed-wing unmanned aerial vehicles using PID as a reference point. The comparison focuses on their ability to handle varying flight dynamics and wind disturbances in a simulated environment. Our results show that the Temporal Difference Model Predictive Control agent outperforms both the PID controller and other model-free reinforcement learning methods in terms of tracking accuracy and robustness over different reference difficulties, particularly in nonlinear flight regimes. Furthermore, we introduce actuation fluctuation as a key metric to assess energy efficiency and actuator wear, and we test two different approaches from the literature: action variation penalty and conditioning for action policy smoothness. We also evaluate all control methods when subject to stochastic turbulence and gusts separately, so as to measure their effects on tracking performance, observe their limitations and outline their implications on the Markov decision process formalism.
* Published at ICINCO 2024
GSGFormer: Generative Social Graph Transformer for Multimodal Pedestrian Trajectory Prediction
Dec 07, 2023



Pedestrian trajectory prediction, vital for selfdriving cars and socially-aware robots, is complicated due to intricate interactions between pedestrians, their environment, and other Vulnerable Road Users. This paper presents GSGFormer, an innovative generative model adept at predicting pedestrian trajectories by considering these complex interactions and offering a plethora of potential modal behaviors. We incorporate a heterogeneous graph neural network to capture interactions between pedestrians, semantic maps, and potential destinations. The Transformer module extracts temporal features, while our novel CVAE-Residual-GMM module promotes diverse behavioral modality generation. Through evaluations on multiple public datasets, GSGFormer not only outperforms leading methods with ample data but also remains competitive when data is limited.
Building Prior Knowledge: A Markov Based Pedestrian Prediction Model Using Urban Environmental Data
Sep 17, 2018
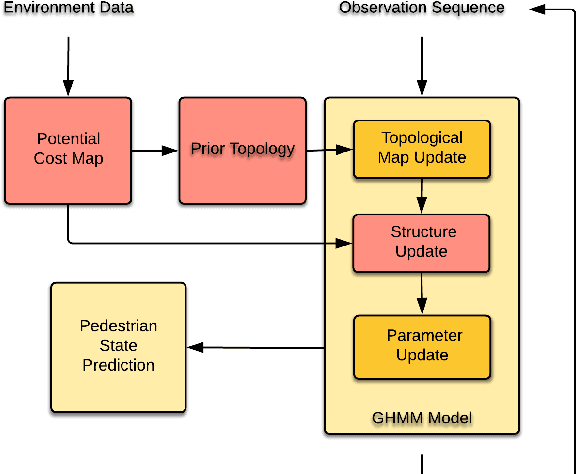
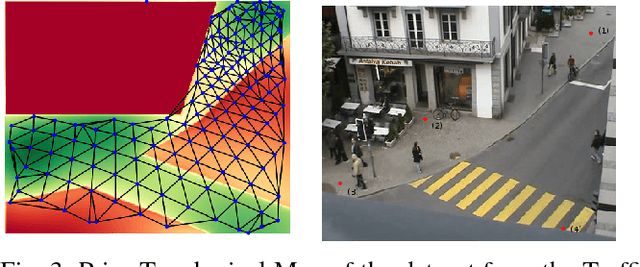
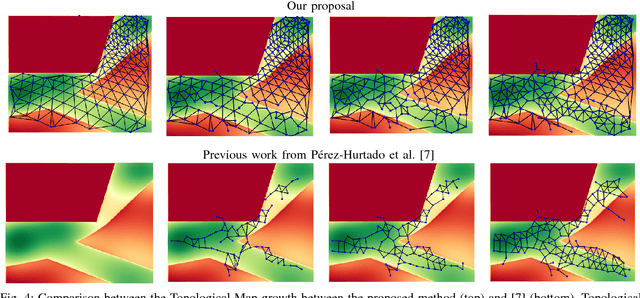
Autonomous Vehicles navigating in urban areas have a need to understand and predict future pedestrian behavior for safer navigation. This high level of situational awareness requires observing pedestrian behavior and extrapolating their positions to know future positions. While some work has been done in this field using Hidden Markov Models (HMMs), one of the few observed drawbacks of the method is the need for informed priors for learning behavior. In this work, an extension to the Growing Hidden Markov Model (GHMM) method is proposed to solve some of these drawbacks. This is achieved by building on existing work using potential cost maps and the principle of Natural Vision. As a consequence, the proposed model is able to predict pedestrian positions more precisely over a longer horizon compared to the state of the art. The method is tested over "legal" and "illegal" behavior of pedestrians, having trained the model with sparse observations and partial trajectories. The method, with no training data, is compared against a trained state of the art model. It is observed that the proposed method is robust even in new, previously unseen areas.