 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid dynamical type theories for navigation
Aug 17, 2021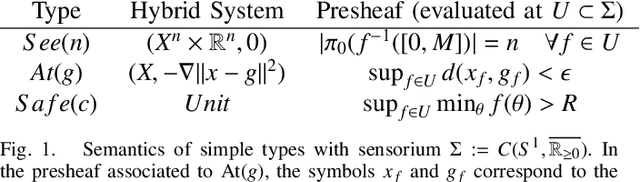
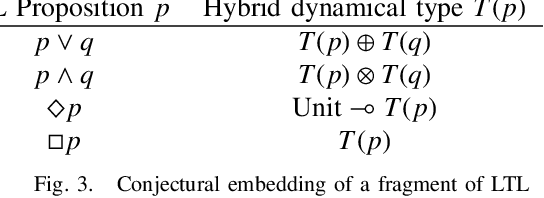
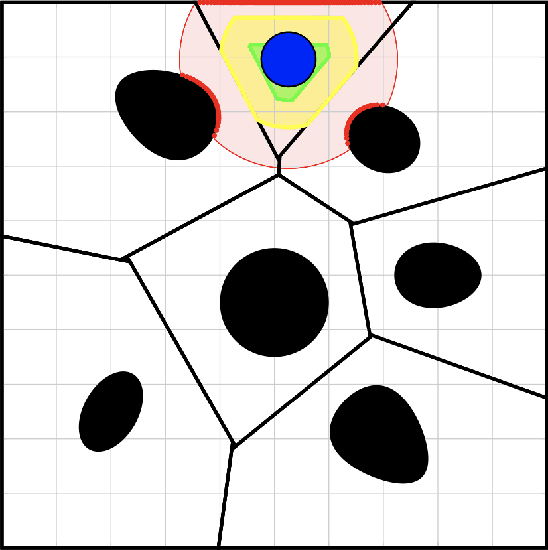
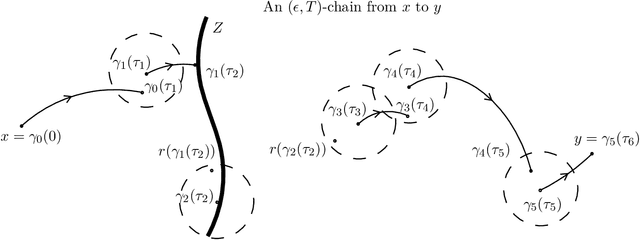
We present a hybrid dynamical type theory equipped with useful primitives for organizing and proving safety of navigational control algorithms. This type theory combines the framework of Fu--Kishida--Selinger for constructing linear dependent type theories from state-parameter fibrations with previous work on categories of hybrid systems under sequential composition. We also define a conjectural embedding of a fragment of linear-time temporal logic within our type theory, with the goal of obtaining interoperability with existing state-of-the-art tools for automatic controller synthesis from formal task specifications. As a case study, we use the type theory to organize and prove safety properties for an obstacle-avoiding navigation algorithm of Arslan--Koditschek as implemented by Vasilopoulos. Finally, we speculate on extensions of the type theory to deal with conjugacies between model and physical spaces, as well as hierarchical template-anchor relationships.
Conley's fundamental theorem for a class of hybrid systems
May 07, 2020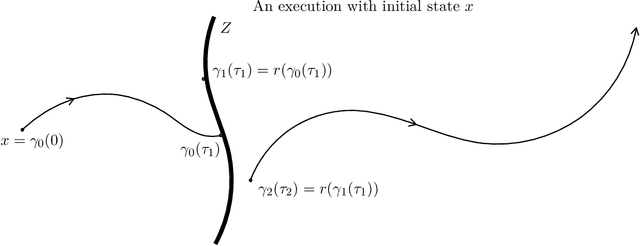
We establish versions of Conley's (i) fundamental theorem and (ii) decomposition theorem for a broad class of hybrid dynamical systems. The hybrid version of (i) asserts that a globally-defined "hybrid complete Lyapunov function" exists for every hybrid system in this class. Motivated by mechanics and control settings where physical or engineered events cause abrupt changes in a system's governing dynamics, our results apply to a large class of Lagrangian hybrid systems (with impacts) studied extensively in the robotics literature. Viewed formally, these results generalize those of Conley and Franks for continuous-time and discrete-time dynamical systems, respectively, on metric spaces. However, we furnish specific examples illustrating how our statement of sufficient conditions represents merely an early step in the longer project of establishing what formal assumptions can and cannot endow hybrid systems models with the topologically well characterized partitions of limit behavior that make Conley's theory so valuable in those classical settings.
Formal composition of hybrid systems
Nov 04, 2019
We develop a compositional framework for formal synthesis of hybrid systems using the language of category theory. More specifically, we provide mutually compatible tools for hierarchical, sequential, and independent parallel composition. In our framework, hierarchies of hybrid systems correspond to template-anchor pairs, which we model as spans of subdividing and embedding semiconjugacies. Hierarchical composition of template-anchor pairs corresponds to the composition of spans via pullback. To model sequential composition, we introduce "directed hybrid systems," each of which flows from an initial subsystem to a final subsystem in a Conley-theoretic sense. Sequential composition of directed systems is given by a pushout of graph embeddings, rewriting the continuous dynamics of the overlapping subsystem to prioritize the second directed system. Independent parallel composition corresponds to a categorical product with respect to semiconjugacy. To formalize the compatibility of these three types of composition, we construct a vertically cartesian double category of hybrid systems where the vertical morphisms are semiconjugacies, and the horizontal morphisms are directed hybrid systems.